


近期,中國工程院院刊《中國工程科學》優先出版了中國工程院鄭南寧院士科研團隊的《無人駕駛安全風險的識別與度量研究》。文章開展了無人駕駛安全風險的關鍵要素定義與識別,并進行了定量測量,率先提出了無人駕駛安全風險六要素框架:單車安全、聯網安全、技術水平、法律政策、社會輿論、產業風險。文章指出,為了有效應對未來無人駕駛的安全風險,企業應加強關鍵零部件的研發和制造,增強信息安全的建設和投入,參與行業標準和法律法規的制定,不做虛假宣傳并積極維護新興行業發展;政府應合理加強測試監管,加速頒布法規與制定標準,引導人才培養并防止人才流失;消費者應保持良好的駕駛與行車習慣,不盲從、不輕信夸張宣傳。
 圖片
圖片
 圖片
圖片
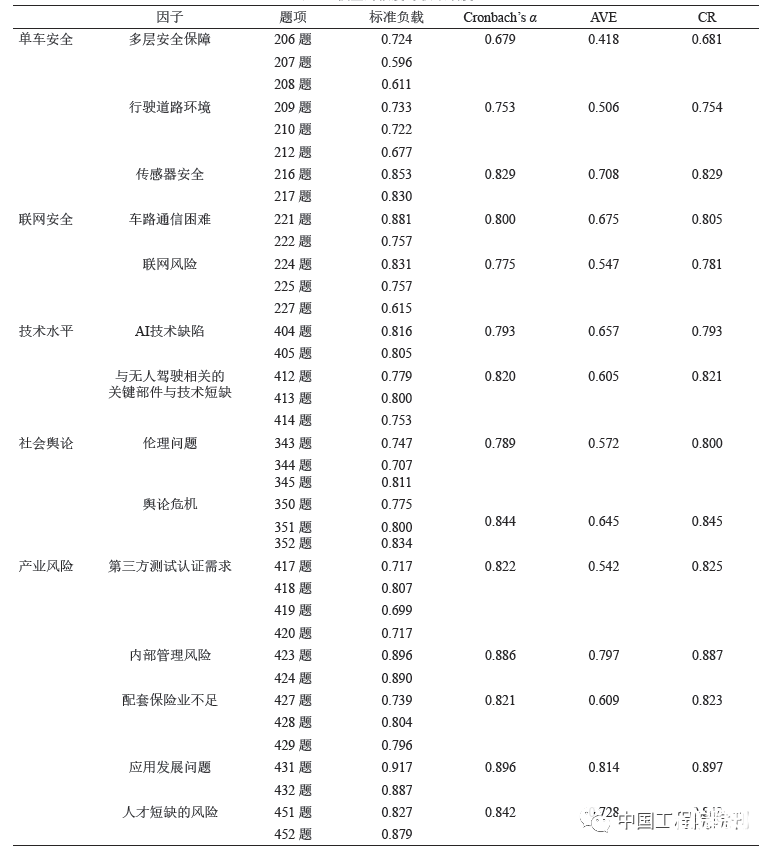
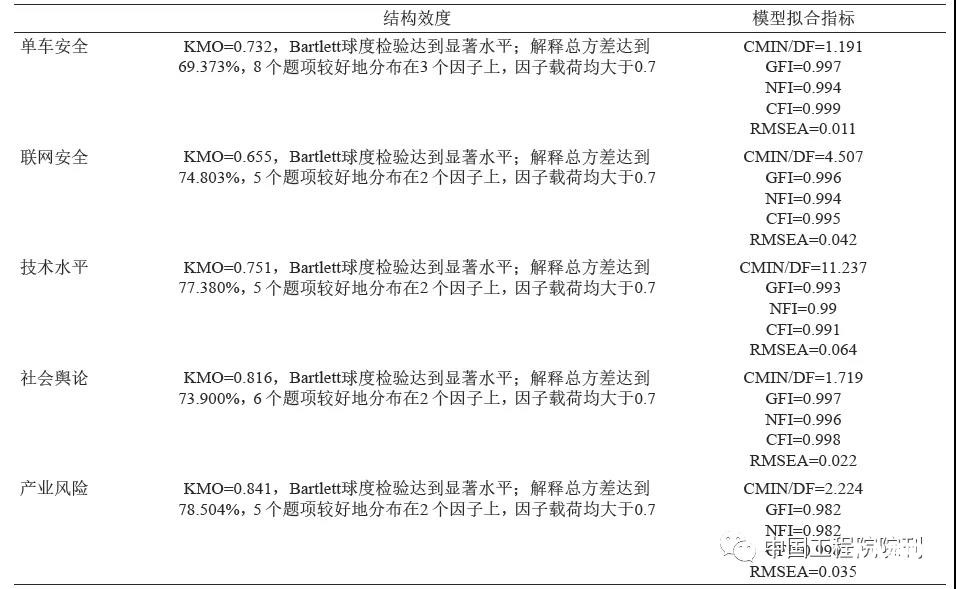
表4 模型的結構效度與擬合指標
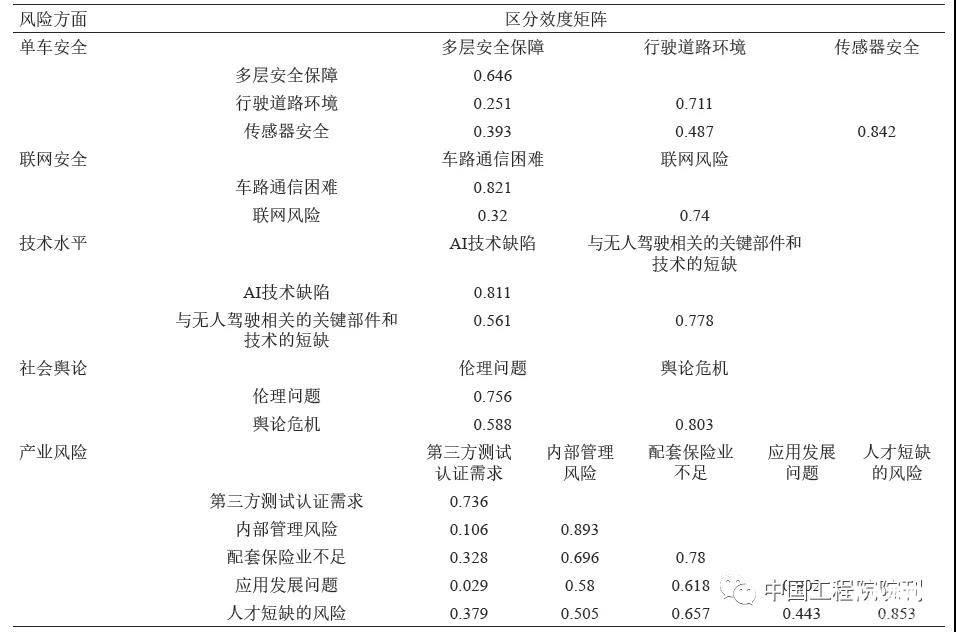
表5 模型的區分效度
一、前言
隨著汽車智能化、電子化的快速推進,無人駕駛已經是未來汽車發展的重要趨勢。發達國家應對汽車行業智能化變革,依托深厚的汽車工業底蘊,針對無人駕駛技術應用積極開展引導和規范。美國企業的無人駕駛技術研究保持領先,而管理/ 立法機構適時出臺相關政策法規,如《聯邦自動駕駛汽車政策》(2016 年)、《自動駕駛法案》(2017 年)。德國著重建立并完善與智能汽車相關的權利、責任歸屬方法與體系,推出了關于自動駕駛的《道路交通法》第八修正案(2017 年)。在我國,無人駕駛汽車正在從初始技術研發階段轉向與特定應用場景結合的大規模實驗和試用階段,與之相關的認識與監管尚處于萌芽階段;產業管理層面積極跟進,如《智能汽車創新發展戰略》(2018 年)對智能汽車產業進行了頂層規劃,《車聯網(智能網聯汽車)產業發展行動計劃》(2018 年)重在智能汽車產業體系構建并提出了車聯網的中長期規劃。
值得指出的是,無人駕駛的安全性作為推動特定場景大規模應用、開展產業化的基本前提,一直是工業界、學術界乃至全社會高度關注的問題。近年來,自動駕駛車輛在測試中撞向行人導致傷亡、電動汽車剎車失靈引發交通事故等,都使得社會和公眾對無人駕駛的安全性更為擔憂。目前,我國智能汽車產業蓬勃發展,企業、科研院所、地方政府等加大/ 支持以無人駕駛為代表的關鍵技術研發投入,力求推動產業發展取得突破。安全是制定法規必須要考慮的前提,只有在安全方面進行妥善和長遠的研究,才能保障智能汽車產業的可持續、高質量發展。從已有文獻來看,因無人駕駛技術的產業化有待推進,行業性的統計資料缺乏;國內外學者較多開展了無人駕駛安全風險的定性研究,也有對無人駕駛技術風險、法律與道德風險概念的分別考量,而安全風險的定量研究未見報道。
針對于此,本文開展無人駕駛安全風險的關鍵要素定義與識別,對其進行定量測量;在剖析數據、概括結論的同時,延伸提出企業、政策、消費者等角度的應對策略,以期為我國無人駕駛安全風險研究、智能汽車行業發展提供基礎性參考。
二、無人駕駛安全風險研究綜述
自動駕駛汽車指依賴于計算機系統、人工智能(AI)技術、攝像與圖像識別、雷達探測、高精度地圖、高精度定位系統等的協同合作,利用電子控制單元(ECU)在無司機控制的情況下安全地駕駛車輛;不調整汽車自身的架構,不改動車輛原有的功能,而是在車身上集成自動駕駛所需的智能器件(含軟件和硬件);根據國際汽車工程師協會制定的標準,分為L0~L5 共6 個級別。為使研究范圍、概念定義更加聚焦精準,本文將“無人駕駛”“自動駕駛”加以區分,即無人駕駛指在完全沒有人類司機操作的情況下,由自動駕駛系統自動安全地操作機動車輛(屬于L5 及以上級別的自動駕駛)。
(一)無人駕駛的工程風險
(一)無人駕駛的工程風險
安全的無人駕駛離不開感知、決策、控制3 個系統的“保駕護航”:感知系統用于掌握行駛路面、交通標志、標線、信號燈的實時變化情況,決策系統開展全局/ 局部的路徑規劃,控制系統進行無人駕駛汽車的油門部件、剎車部件、方向控制盤、行駛速度變化桿的控制。
無人駕駛汽車的網絡安全也是重要方面,數據加密、網關防毒、入侵檢測是常見的3 種保護方法。例如,有學者研究了無人駕駛汽車通信涉及的認證協議、密鑰管理協議,旨在提高通信安全性、成本控制、通信延遲控制的水平。
與傳統汽車類似,無人駕駛的工程技術安全也需結合具體場景進行考慮。針對一些特殊場景(如車輛涉水),有學者提出了安全應對措施設計方案:利用超聲波雷達進行探測,判斷險情后鳴響蜂鳴器、閃爍指示燈、彈出顯示屏提示,同步及時剎停。
(二)無人駕駛的社會風險
無人駕駛的社會風險包含了法律、倫理、心理、管理四方面。需要提及的是,目前還沒有學者對無人駕駛的心理、管理等內容進行探討,也沒有針對無人駕駛進行全面的風險識別與評價研究(這是本文工作圍繞無人駕駛安全風險識別與度量來展開的出發點)。在法律風險方面,研究者主要關注侵權責任的主體認定、因果追溯、舉證義務等,為完善立法提供理論依據。
①無人駕駛汽車在法律層面非“人”,不能成為承擔侵權責任的主體。依據事故情形的不同,承擔責任的主體有所區別:生產者承擔責任的情形,是產品出現缺陷時由生產者承擔侵權責任;使用者承擔責任的情形,是在人工駕駛模式下發生事故或因為使用人不當養護而使用導致的事故;銷售者承擔責任的情形,是在不當存放產品、未如實履行告知義務而導致事故時承擔責任。
②關于事故因果追溯,有研究建議參照民機、高鐵使用“黑匣子”技術進行記錄,以便事后追溯;但在萬物互聯時代,僅靠車載“黑匣子”可能面臨黑客攻擊、信息篡改等問題,可以建立跨區域、專業性的數據分析中心,專門開展無人駕駛信息的保存與分析。
③關于舉證義務,當前法律普遍遵循“誰主張、誰舉證”的原則,然而在自動駕駛領域,出現事故后由外行的消費者承擔維權相關的舉證責任顯失公平;因而有建議提出,只要消費者可以證明事故發生時車輛處于自動駕駛模式即可。
在倫理風險方面,研究者對社會上的倫理價值傾向進行了調查,也探討了涉及倫理時的機器處理與應對策略。有研究對社會的道德取向進行了調查,以道德機器研究最具影響力:設計了在線實驗網站,統計被實驗者們在面對無人駕駛遇到的倫理道德困境時所選擇應對方案的側重點,由此統計出各國被實驗者的選擇傾向以及文化、國家的不同導致的選擇傾向差異性。有研究通過測試發現,用戶認可按照功利性原則設計的無人駕駛汽車并希望他人購買,但自身更愿意乘坐能夠保護乘客的無人駕駛汽車。也有實驗得出了不同的結論,即參與者的道德傾向更高,更愿意“舍己救人”;特別是考慮到年齡因素后,參與者傾向于為了更多人的安全而采取措施(如控制車輛轉向路側)。
三、無人駕駛安全風險的識別
采用探索性的案例調查和質性研究方法開展風險識別研究。結合技術安全研究的已有論述、新聞報道中有關安全的內容討論,初步整理了訪談提綱并在訪談過程中確定,待討論的無人駕駛風險涉及工程技術、社會人文兩個主要方向以及功能安全、信息安全、法律風險、倫理風險等細分方向。
(一)案例的收集與選擇
資料收集包括二手數據調查、深度訪談兩種渠道:前者既有公開信息(如公司主頁信息、工商注冊信息、新聞報道、人物專訪、上市公司年報等),也有公司內部資料(如內部刊物、內部宣傳冊、演示文檔等);后者的交流對象來自珠江三角洲(珠三角)、長江三角洲(長三角)地區,包括企業高級管理人員、項目經理、技術人員,政府管理人員等,具有豐富的從業經驗,對無人駕駛安全風險有著良好了解和認識。在本課題研究中,具體選擇了珠三角地區13 個企業案例,珠三角、長三角地區共9 個政府案例;相關案例文檔共22 個、約44 萬字,限于篇幅而不再贅述。
案例選擇的標準如下:①案例研究差別復制原則,企業需要從事不同類別的無人駕駛業務,政府機構處于不同地區且管理業務屬性有區別;②數據的可得性,選取的企業、政府機構能夠對外開放一手或二手資料,尤其是企業應處于穩定發展狀態;③研究的便利性,經當地政府、友好組織介紹后,可與被調研企業建立良好的合作關系,便于調研及回訪;④案例資料的內容質量,所選案例能夠充分反映無人駕駛的AI 安全風險要素。
(二)數據分析與編碼
采用扎根理論方法,對收集的資料進行編碼分析(編碼工具為Nvivo 軟件),進而識別無人駕駛的安全風險。
1. 開放式編碼
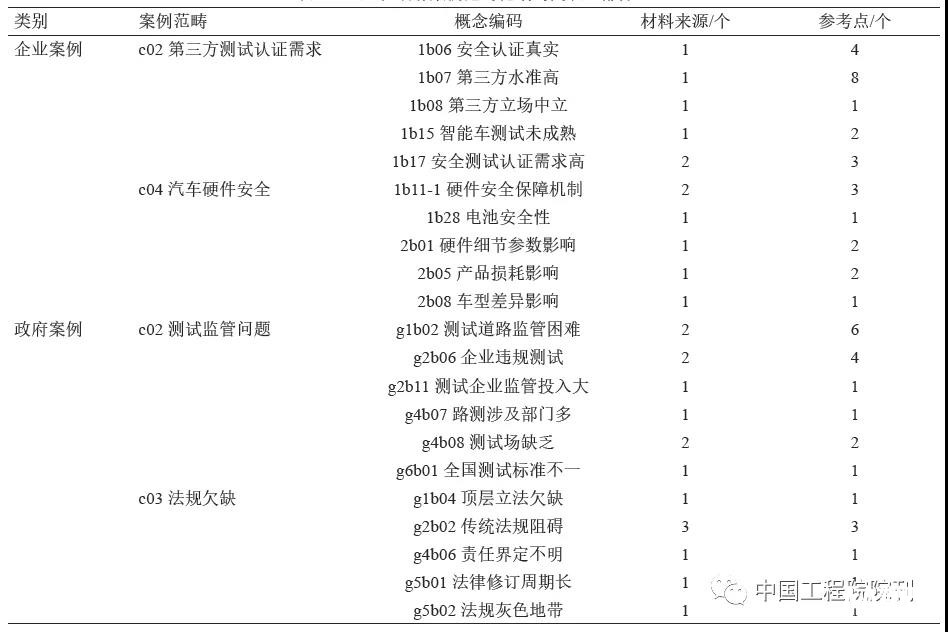
圍繞研究主題,概念化提取資料后進行范疇化:概念化編碼,包括貼標簽預處理、正式概念化;范疇化編碼,即經過不斷比對以修正概念化編碼。因存在語義的重復、交叉,需對概念開展進一步的歸納與整合;為避免信息過早丟失,研究中對企業案例概念、政府案例概念分別進行整合。為此,在前期得到98 個企業案例概念編碼、71 個政府案例概念編碼的基礎上,對編碼進行比對和修正,獲得了25 個企業案例范疇、13 個政府案例范疇(限于篇幅,僅部分展示于表1)。
表1 企業和政府案例范疇化編碼列表(部分)
2. 主軸編碼
對開放式編碼過程中得到的范疇之間的關聯關系進行分析,將范疇之間相互關聯的部分歸為層次更高的主范疇。對前步驟中的范疇進行進一步的整理、歸納與合并,最終得到了6 個企業案例主范疇、3 個政府案例主范疇,至此完成風險識別階段的工作。
(三)安全風險的要素框架
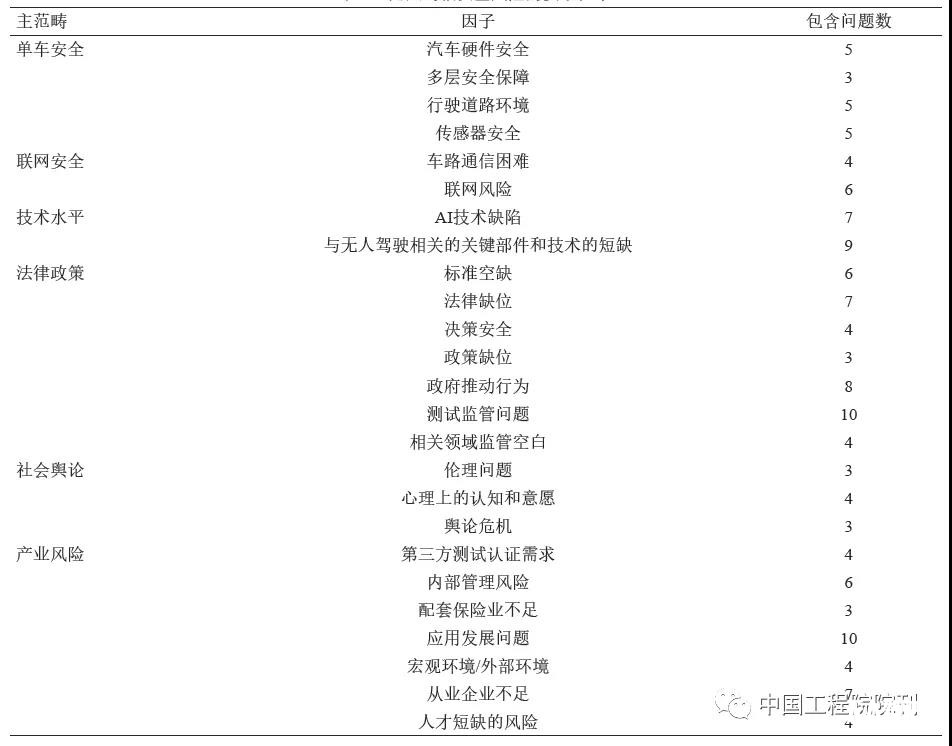
考慮到企業案例框架、政府案例框架的內涵具有較高的重合度,本研究對其進行調整、合并而得單一框架(見表2):第一層為主范疇,包括6 類安全風險要素,其中前3 類為工程風險,后3 類為人文社會風險;第二層為安全風險要素的度量因子;第三層為安全風險要素的度量問卷測量題項數。
表2 無人駕駛安全風險的要素框架
四、無人駕駛安全風險的度量
(一)調查問卷設計
對于要素框架中的各個概念,參照其初始來源的文本,編寫與之對應且簡潔概括的量表問題,如“不同車型之間的差異會對無人駕駛安全產生重要的不利影響”;最終得到企業案例框架、政府案例框架中所有概念的對應問題,以此作為調查的原始題庫。隨后,研究團隊成員開展了兩輪意見探討及修正,得到了由142 個問題構成的初始問卷:第一部分為被調查對象的個人基本信息(包括性別、年齡、所在城市、學歷、是否已就業、從事行業、是否在無人駕駛及相關的企業工作過、從業時長),第二部分包括單車安全、聯網安全兩方面共28 道量表題,第三部分包括法律政策風險、社會態度風險兩方面共52 道量表題,第四部分包括技術水平、產業風險兩方面共54 道量表題。
(二)試調查和問卷修正
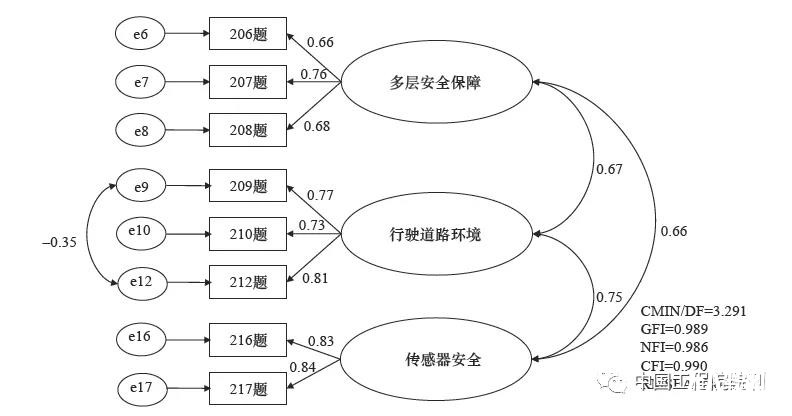
本次調查通過網絡自填問卷的形式進行,借助長沙冉星信息科技有限公司的“問卷星”平臺進行發放,持續時間為2020 年7 月25 日至31 日;共收到反饋問卷1310 份,其中有效問卷1195 份(有效率為91.22%)。綜合考慮信度、結構效度、區分效度、收斂效度、整體模型適配度評價指標及修正指標,在驗證性因子分析模型中,對題項、潛變量進行大范圍的刪減與修正,如單車安全部分的測量模型經過調整后(見圖1)具有較好的擬合效果。
圖片圖1 單車安全測量模型
在信度方面,3 個因子的Cronbach’s α 系數取值分別為0.742、0.782、0.822(均在0.7 以上),說明量表具有較高的可信度。
在結構效度方面,采用探索性因子分析對結構效度進行初步檢驗。KMO 值為0.870,通過Bartlett球形度檢驗,達到顯著水平,適宜進行探索性因子分析。解釋的總方差為72.832%,采用主成分分析法提取固定數量因子、方差最大化正交旋轉方法分析各測量題項,得到探索性因子分析結果為:7 個題項在因子上的載荷均大于0.7,209 道題的載荷也有0.616,題項較好分布在3 個因子上。
在收斂效度方面,“多層安全保障”“行駛道路環境”“傳感器安全”3 個因子的平均變異萃取量(AVE)分別為0.495、0.592、0.698,“多層安全保障”極為接近0.5,另外兩個均大于0.5 ;相應的組合信度(CR)分別為0.746、0.813、0.822(均大于0.7),表明各個因子均有較好的收斂效度。在區分效度方面,3 個因子的AVE 平方根均大于與其他因子之間的相關系數,表明該部分模型具有較好的區分效度。
(三)正式調查和風險度量
委托“問卷星”平臺提供樣本服務,持續時間為2020 年9 月1 日至15 日,共收集了3167 份正式調研問卷,其中有效問卷3153 份(有效率為99.56%)。在各部分模型驗證時,均預先進行樣本數據的詳細清洗。
1. 法律政策風險模型驗證
主要根據各樣本中、各因子下的題項組內方差,各組均值的組間方差進行篩選。針對法律政策安全部分“標準空缺”“法律缺位”“政府推動行為”“相關監管領域空白”4 組問題,運算每個樣本在每組問題下的回答組內方差并進行求和,按照方差和對所有樣本進行排序(組內方差之和越小,排序越高);計算4 組問題的組間方差,在組內方差相同的情況下,組間方差越大則排序越高。按照單車安全部分的題項進行篩選,選擇排序靠前的1000 份問卷進行模型驗證。
統計被調查人群特征發現,各特征人群的占比與試調查樣本相比基本沒有變化。男性占比47.7%,女性52.3%, 比例更顯均衡;年齡在20~30 歲、30~40 歲范圍的分別占28.6%、35.1%;學歷水平以大專、本科為主,分別占29.1%、36.3%,占比基本均衡,具有一定代表性;已工作者占多數,可認為具有良好社會經驗。
處于就業、失業、自由職業3 種狀態的調查對象共有838 人,沒有集中于某一行業的情況;“制造業”“信息傳輸、軟件和信息技術服務業”人數占比稍高(分別為22.91%、15.04%),這些行業與無人駕駛關聯相對緊密,因此樣本同樣可以代表對無人駕駛有一定關聯的普通人。曾經在無人駕駛相關企業工作過的調查對象有166 人,在從業時長方面的分布較為均衡,少于1 年的占24.1%,1~3 年的占45.78%,3~5 年的占13.86%,5~10 年的占12.65%,10 年以上的占3.61%;從業1~3 年的占比較高,考慮到具有豐富從業經驗的人數本身占比較少,因而對整體產生的影響不明顯。
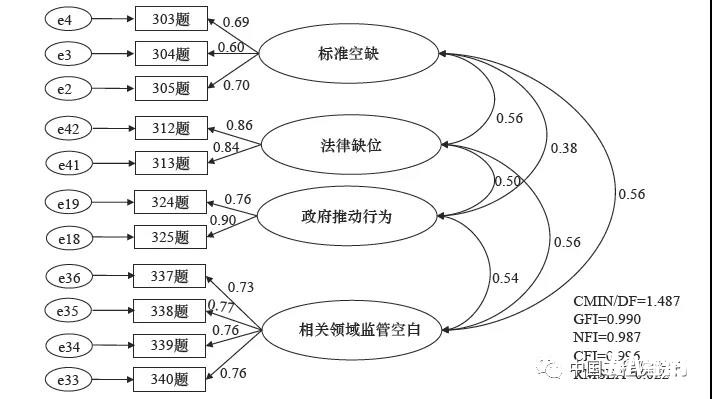
對于法律政策風險部分的測量模型,采用詳細篩選后的正式樣本進行驗證(見圖2),可見模型整體擬合效果良好。
圖片圖2 法律政策風險測量模型
在信度方面,4 個因子的Cronbach’s α 系數取值分別為0.693、0.837、0.813、0.844,第1 個因子的“標準空缺”接近0.7,另外3 個均大于0.7,說明本次驗證中的量表可信度良好。
在結構效度方面,KMO 值為0.850, 通過Bartlett 球形度檢驗,達到顯著水平;解釋的總方差為72.895%,在獲得的探索性因子分析結果中,11 個題項普遍較好(分布在4 個因子上),各個題項在對應因子上的載荷均大于0.7。
在收斂效度方面,“標準空缺”“法律缺位”“政府推動行為”“相關領域監管空白”4 個因子的AVE 分別為0.437、0.720、0.695、0.577, 有3 個大于0.5 ;相應的CR 分別為0.698、0.837、0.819、0.845,有3 個大于0.7,表明本次驗證的各個因素具有較好的收斂效度。
在區分效度方面,4 個因子的AVE 的平方根均大于與其他因子之間的相關系數,表明該部分模型的區分效度較好。
2. 其他風險的模型驗證結果
單車安全、聯網安全、社會輿論風險、技術水平風險、產業風險的模型結果如表3~5 所示。
在信度方面,5 個安全風險模型的各因子均有較好的信度,除單車安全下的“多層安全保障”之外,其余因子的Cronbach’s α 均大于0.7。
在結構效度方面,5 個安全風險模型的結構效度較好,在探索性因子分析中均有較好的結果。在驗證性因子分析中,5 個模型擬合的效果整體較好(除了科技水平風險略欠理想);5 個模型的收斂效度均較好,除了單車安全下的“多層安全保障”之外,各因子AVE 均大于0.5,CR 均大于0.7 ;4 個模型的區分效度都較好,所有因子的AVE 平方根均大于與同模型中其他因子之間的相關系數。
至此,本研究完成了建模過程驗證(基于兩輪問卷調查收集到的量表數據),形成了一套可度量、可觀測的無人駕駛安全風險要素框架(見表3)。
表3 模型的信度與收斂效度
表4 模型的結構效度與擬合指標
表5 模型的區分效度
五、研究結論與應對策略
(一)研究結論
在風險識別階段,本文運用扎根理論,從珠三角地區的無人駕駛企業案例,珠三角、長三角地區的政府案例資料出發,提煉識別了有關無人駕駛的安全風險;按照概念化– 范疇化– 主軸化的編碼步驟梳理出風險要素的層次,由此形成無人駕駛的安全風險框架。企業案例得到的風險框架有6 類要素(主范疇):單車安全、聯網安全、技術水平、法律政策、社會輿論、產業風險;其下包括25 個副范疇、98 個概念,基本上是企業從業者較為關注的問題。政府案例中得到的框架包括3 個主范疇:官方約束、環境不足、產業自身問題,其下包括13 個副范疇、71 個概念;政府人員的關注問題聚焦于管理方面,如政府對行業的推動手段與能力、無人駕駛汽車上路測試監管、無人駕駛關聯領域監管等。此階段研究建立了無人駕駛安全風險的理論雛形,可為后續分析提供理論層面的支持。
在風險度量階段,本文依據風險框架編制調查量表、設計調查問卷,通過試調查的信度和效度分析完成了調查量表修正;針對正式問卷調查結果,通過驗證性因子分析方法驗證了風險測度。在無人駕駛安全風險中,第一層為單車安全、聯網安全、技術水平、法律政策、社會輿論、產業風險6 類要素,第二層涉及18 個風險度量維度,第三層包括48 個風險測度題項。
據此,率先從理論、實證兩方面入手,建立了具有普適性、可度量的無人駕駛安全風險框架;將風險形成理論,相應適用范圍可進一步探索拓寬(由小變大、從典型人到普通人)。
(二)無人駕駛安全風險的應對策略
1. 企業方面
針對單車安全,企業應提高關鍵零部件質量,將傳統汽車的零部件與無人駕駛技術進行適配,共同保障安全駕駛;無人駕駛車輛會遇到復雜或罕見__路況(如車道線不清晰、極端惡劣天氣等),應拓寬訓練場景范圍,盡量適應真實行駛場景。
針對聯網安全,與車輛智能化的發展趨勢相適應,企業需加強信息安全建設,規避可能的黑客攻擊以避免重要數據失竊,保持各類信息的安全可靠;無人駕駛汽車的控制與決策權力應分散化,車端必須保留足夠權限,以免被遠程操控。
對于技術水平風險,AI 技術仍然存在不確定、不可解釋、依賴數據等情況,對新型、突發問題的解決能力比不過人類,因此無人駕駛不宜過度依賴于此;應將其他技術(如第五代移動通信、車聯網、區塊鏈等)與AI 技術配合使用,同時注重無人駕駛關鍵零部件(如底盤、傳感器、芯片、材料等)的技術研發與性能升級。
對于法律政策,鑒于頒布都有一定的滯后性,建議企業積極關注并超前研判,適時參與無人駕駛相關法律、標準的研究制定;企業開展無人駕駛技術探索時需嚴格遵守法律法規,測試車的改裝與調試應確保足夠的安全性。
對于社會輿論,企業應合規開展銷售活動,不進行虛假宣傳以避免導致消費者誤判無人駕駛技術能力,促進業務的可持續;倡導無人駕駛行業的良性競爭,消除惡意的行業輿論抹黑,避免消費者對整個新興產業存疑,為行業發展創造良好氛圍。
針對產業風險,企業應清醒識別自身不足,如管理體系完善與否、風險危害認知是否欠缺、應變更新能否及時有效,進而采取針對性改善措施;建設并運用行業獨立第三方機構,發揮專業化安全考察與認證的保障作用;投資活動應綜合考慮無人駕駛產業的中長期發展,倡導價值投資,規避過度快速商業化可能造成的行業發展短視和無序。
2. 政策與監管方面
無人駕駛的監管需要多部門協調與配合,建議相關部門加強業務聯系和交流,規避信息、能力不對稱可能導致的工作低效。管理機構應及時開展無人駕駛行業的頂層設計和綜合規劃,向社會提供清晰的產業布局導向,如推廣重點、推廣方式等,逐步消除零散補貼企業等傳統方式。
合理加強對測試及相關領域的監管。目前一些企業存在沒有取得資質就私自改裝、違規測試車輛的現象,對此應提高警惕并堅決查處,盡快消除違反交通安全法律法規的改裝與測試行為。
建議管理部門盡快開展相關法規和標準的頂層研究和布局設計,就無人駕駛的法規和標準開展社會討論并擇機頒布,為企業的商業投資、技術研發活動提供相對明確的指引與約束,有利于無人駕駛行業的快速、有序發展。
建議盡快開展無人駕駛車輛事故后的責任歸屬劃分、因果追溯等法律問題探討,這是企業進行市場探索、技術發展的重要依據之一。例如,現行的道路交通安全法律條文,可以依據無人駕駛技術進步情況而擇機調整,更好適應時代的進步(如不再一刀切地禁止駕駛員雙手離開方向盤)。
建議加快建設無人駕駛人才培養體系。一方面完善高校、科研院所的本土人才培養模式,適應無人駕駛行業快速發展需求;另一方面采取積極措施吸引并留住人才,如引進國外優秀的成熟人才,跨行業吸引專業人才加入等。以核心人才為依托,逐步革新教育培養模式,支持線控底盤、芯片、傳感器等關鍵技術突破與國產化應用。
3. 消費者方面
在心理層面,消費者傾向于在無人駕駛技術尚處在發展進步階段就寄予過大的信任,從而在駕駛時可能有所松懈、過度依賴系統。建議消費者保持車輛駕駛員應有的素養和警覺,延續良好的駕駛習慣,注重行車文明;尤其是在遭遇無人駕駛車輛測試時,不應刻意別車、鳴笛以免發生事故。
在輿論層面,消費者應當放平心態,不輕信夸張宣傳,即使智能車輛在銷售階段可能被夸大功能,也應對產品保持合理的期望,客觀看待無人駕駛產品進步中的不足;一些媒體可能會因同行競爭而對無人駕駛企業進行不適當的信息傳播,消費者對此應保持理性而不宜在事態未明階段盲目跟風。
對于無人駕駛調查研究,建議普通消費者特別是對無人駕駛行業有所關注、有所思考的“發燒友”“熱心人”,積極貢獻自己的想法、認識、判斷,為行業發展提供公眾聲音、真知灼見。






















