港口物流,大概是無人駕駛各細分賽道中“最不起眼”的那條賽道了。對這個賽道上的無人駕駛公司而言,通常,“幾億元”便是融資額的天花板,因為,在投資機構的眼里,這個賽道實在太小了,“缺乏想象空間”。
然而,在一些理性的創業者看來,最重要的并不是這個賽道的市場空間有多大,而是“我自己能分到多少市場”。對他們而言,與其追逐一個看起來更大,但商業化也更難,或者“我只能分到很少一部分”的大賽道相比,在港口這個小賽道上深耕,才是更務實的策略。
并且,往中長期看,這些創業者們認為,他們還可能將在做港口無人駕駛中積累的能力拓展至干線物流場景;甚至,在商務資源、固定運行線路等方面,他們還比一些當前聚焦于干線物流場景的無人駕駛公司更有優勢。

一.無人駕駛集卡,是碼頭數字化中必不可少的一環
1.港口的痛點及無人駕駛能帶來的價值
通常,業界所說的“港口無人駕駛”,特指內集卡,主要負責從貨船到堆場之間(卸貨和裝貨)的往返運輸。結合港口的現實痛點來看,無人駕駛給港口帶來的價值主要是:安全、降本、增效。
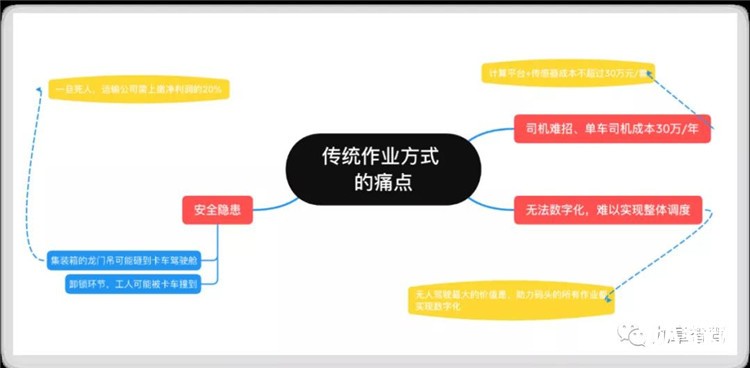
據某碼頭的資深管理者介紹,與安全和降本相比,增效才是無人駕駛帶給碼頭的最關鍵價值。
在傳統的有人駕駛作業中,碼頭方面難以對各車輛進行整體調度,因而經常會發生排隊混亂、搶行加塞等問題,加之半程空載、作業時間不易把控等問題,運輸效率受到嚴重影響;而在無人駕駛作業中,中控調度平臺能夠把碼頭作業每一個業務節點的數據全部自動化采集,并串聯起來,進而將碼頭所有的作業都數據化,這樣,就可以在不需要花太多成本的情況下極大地優化碼頭的調度效率。
以寧波招商大榭碼頭為例,在作業數據化后,整體效率初步估計可以提高30-40%。對船運公司而言,船舶在碼頭停留的時間可以減少1/3;相應地,碼頭的吞吐量也可以從300萬TEU(標準箱)提升到400-500萬TEU,甚至600萬TEU。
2.為什么非得是無人駕駛?
其實,對貨船到堆場之間的往返運輸(行業術語稱為“水平運輸”)而言,無人駕駛集卡并不是唯一方案。已知的方案共有跨運車、AGV、IGV和無人集卡四種:
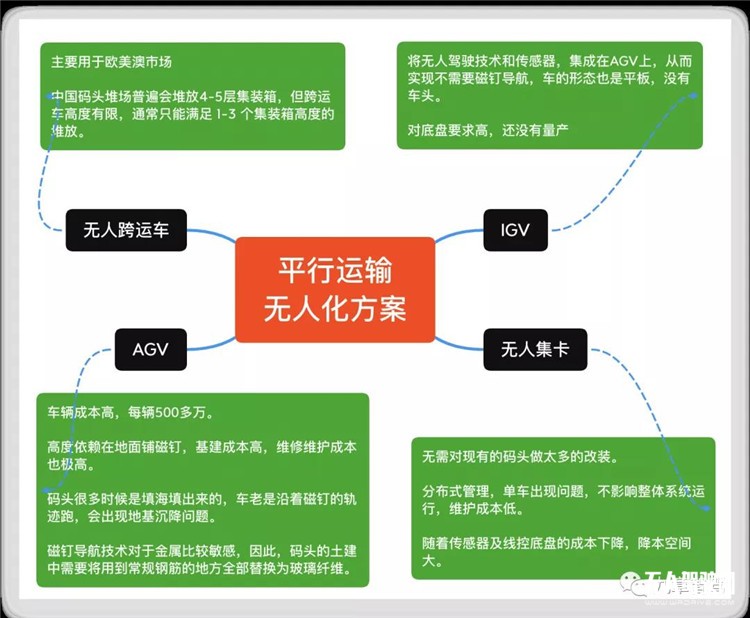
即使沒有無人駕駛,碼頭自動化也是要照常推進的,但鑒于AGV方案有上述弊端,天津港、寧波招商大榭碼頭等在做數字化改造時希望能找到更好的方式,這正好為無人駕駛技術的落地提供了很好的應用場景。
二.既不能被“降維打擊”,又要能夠“升維”
近日,《九章智駕》在跟一位港口無人駕駛公司創始人交流時,對方提到他們在跟投資人交流的過程中經常遇到的一個“奇怪的邏輯”:他們既不希望你被其他賽道的玩家“降維打擊”,又期望你能夠向其他場景拓展。
說來也巧,港口無人駕駛,恰好是一個有可能同時滿足上述兩個要求的賽道——
(1)很難被“降維打擊”
港口無人駕駛公司說自己很難被其他賽道的公司降維打擊,主要理由是:做港口無人駕駛,技術框架本身在成功要素中所占的權重僅有2-3成,剩下的7-8成,都取決于對場景的理解;換言之,你能否吃透碼頭場景,才是決定成敗的關鍵。
而來自碼頭官方的資深人士也證實,碼頭場景有其特殊性,而這些特殊性,對無人駕駛的感知、決策、定位、控制、交互等環節都提出了特殊的要求。具體如下:
① 北方多雪,南方多雨,加之霧霾、凝露等海邊常見天氣,都會對激光雷達、相機等傳感器的感知能力產生很大的干擾。
② 堆場旁邊會有很多雜草,通常,在不影響大局的情況下,碼頭不會把雜草清理得非常干凈,而這些雜草會對無人駕駛的傳感器感知造成一些影響。
③ 港區內有各種不同的大型或中型、小型作業設備,比如龍門吊、正面吊、堆高機,無人集卡的感知系統需要在僅看到一部分的時候就能將它們都識別出來。
④ 港區欄位里的很多車道線是有斑駁的,而重劃車道線則需要把港區欄位的兩個端頭都封起來,這對港區作業會有很大的影響,因此,碼頭通常是三、四年才會重新劃線。這意味著,無人集卡的感知系統就必須在車道線模糊不清的情況下也能將其識別出來。
⑤ 下雨天,坑坑洼洼會有積水,積水少的時候,反射率很不穩定,在夜晚反光效果強的時候,很容易產生誤檢,影響自動駕駛的正常行駛。
⑥ 空箱場地會堆得比較高,GPS信號會被遮擋,無法正常接收。
⑦ 在海邊或者龍門吊下方,GPS信號接收會受到一定干擾。
⑧ 港口的大部分轉彎其實是沒有交通標記的,車輛需要通過學習人類司機的行為判斷怎么先行、左轉、右轉。
⑨ 堆場里貨物的排列和放置一直在不停地變化,而集裝箱不夠放的時候,路會被拿去放集裝箱,所以道路其實也是不固定的,這對匹配特征的選擇、高精地圖眾包更新的挑戰會更大。
⑩ 半掛車的運動模型比乘用車復雜很多,加上線控響應周期長,顯著增加了控制難度。
? 要保證集裝箱精準地被放到車上,高精定位需要做到5cm以內(干線物流的定位做到10cm就OK了)——光高精定位做好了還不夠,控制精度也要做好才行。
? 港區內的一些道路會有沉降,也會有用于排水的坡度,高高低低的,對控制系統的挑戰比較大。
? 很多碼頭是沒有紅綠燈的,與十字路口車輛的交互挑戰很大。
? 集裝箱的扭鎖有上萬種型號,對車輛跟設備的交互能力提出了很高的要求。
? 在輪胎式龍門吊等大型設備需要移動的時候,無人集卡的決策邏輯會面臨很大的考驗——除了需要判斷什么時候停車、等待、避讓,還需要和上層系統進行很好的交互。
沒有在碼頭待足夠長時間的新玩家,很難搞定這些難題。
(2)從內集卡向外集卡場景拓展
當前,港口水平運輸的市場規模總共為約300億元(據斯年智駕CEO何貝介紹,其中港口內集裝箱運輸市場有60億,港口內干散貨運輸市場約240億),這意味著,港口內水平運輸市場的天花板還是比較容易看到。這也是為什么港口無人駕駛公司的融資額通常很難超過幾個億的原因。
不過,斯年智駕CEO何貝在跟筆者交流時提到了港口無人駕駛從內集卡向外集卡場景拓展的可能性。
所謂“外集卡”,即往返于碼頭和附近物流站的集裝箱卡車,負責港口到倉庫的貨物往返,或者是港口對港口的短駁運輸。外集卡雖然已經在開放道路行駛,但往往圍繞碼頭進行,行駛區域較小。
據斯年的測算,外集卡運輸市場的體量超過1000億/年。
(3)向干線物流場景“升維”的可能性
何貝跟辰韜資本管理合伙人蕭伊婷等人還認為,港口無人駕駛公司是有機會將技術的應用拓展至干線物流場景中去的,而最關鍵的原因則是兩個場景可共用相同的線控底盤。
何貝此前在跟筆者交流時曾說:
“重卡的線控底盤要做到穩定可靠,再加上冗余的話, 難度非常大。但你如果沒有需求量,OEM就不會積極配合你打磨底盤,而我們現在就能憑港口的訂單去跟OEM談合作,同時,我們還會把未來向干線物流場景拓展的計劃告訴OEM,OEM也認可這一邏輯,因此,配合力度就很大。
“通常,主機廠打磨出一款好的線控底盤需要2-3年時間,這也是我們相比于那些訂單量一時半會兒還無法起來的干線物流場景無人駕駛公司的一大優勢。”
在2020年10月底的一次媒體溝通會上,蕭伊婷說:
“現階段,無人駕駛在干線物流場景很難起量,因此也用不了多少線控底盤,而港口場景對線控底盤的用量更多一些,正好有助于打磨底盤,提升工程化能力。
“干線物流還要經過七八年的融資才能落地,但做港口場景有一個優勢,到2022年就會有收入,到2024年會有不錯的利潤,形成自我造血能力,那時再進軍干線物流場景,就容易一些。并且,在這個時候,港口無人駕駛公司在硬件的工程化能力上已經有很深的積累了。”
蕭伊婷還說:“無人駕駛能從封閉場景拓展到干線物流場景的,只有港口賽道。”
當然,線控底盤的復用,只是港口無人駕駛公司向干線物流場景拓展的必要條件,卻不是充分條件。實際上,兩個場景的算法差異還是挺大的,因此,蕭伊婷也認為,在向干線物流場景拓展時,“港口無人駕駛公司需要組建一個新的算法團隊,這對CEO的團隊管理能力是一個很大的挑戰。
三.國內港口無人駕駛賽道的主要玩家
當前,港口無人駕駛解決方案的提供商主要有AI背景的無人駕駛初創公司及工程設備制造商兩股勢力,其中,站在聚光燈下的主要是前一股勢力。
現階段,在港口賽道上依然比較活躍的代表性無人駕駛公司就主線科技、斯年智駕、飛步科技等。商業模式,主要有兩種:
(1)技術方案供應商,即科技公司賣技術方案給重卡廠商(前裝)或碼頭(存量車改造),并收取服務費。主線科技、飛步均走這條路線。
(2)運輸服務運營商,即科技公司自己采購車輛并完成無人化改造,然后為碼頭提供無人駕駛運輸服務。現階段,在港口無人駕駛賽道,走這條路線的只有斯年智駕一家。
其中,主線科技主要是跟重汽合作,在天津港已經部署了30輛車;斯年智駕用的是比亞迪的線控底盤,有8輛車已經在寧波招商大榭碼頭運行,在唐山港也有10輛車同時作業,還在陸續交車中;飛步科技在寧波已經賣出去差不多13輛車了。

在這幾家公司中,斯年智駕是成立時間最晚、但發展速度也是最快的。
斯年智駕創始人兼CEO何貝曾擔任某自動駕駛公司CTO。由于之前在其他港口已經有過25輛無人集卡的交付經驗,因此,斯年盡管成立時間晚,但起點很高——成立當月,就拿下了寧波招商大榭碼頭的測試訂單。

問起為什么會率先在寧波招商大榭碼頭做測試,何貝解釋道:“寧波招商大榭碼頭場景復雜,實現無人駕駛的難度大,在寧波招商大榭碼頭打磨成熟的技術,之后再向其他港口拓展就比較容易。如果一開始是選擇一個場景簡單的碼頭,技術進步就很慢,向外拓展的難度也很大。”
斯年共有超過30名研發人員及測試工程師常駐寧波北侖區,可在半小時內趕到作業現場處理問題。甚至,為了保證自動駕駛系統的產品化效果,何貝與技術團隊常常在冬冷夏熱的現場一待就是幾個月;晚上風大氣溫低,何貝與團隊在港口曾一度頂著-20°的寒冷天氣對自動駕駛集卡車輛進行調試。
2021年1月,斯年智駕已實際作業數萬箱,實現了不挑航線、不挑船型、全場地、全工況和全天候的有人無人混行作業。
筆者問何貝:“在斯年成立一年來,哪些事項的進展未達到預期,哪些是超出預期的?”何貝答道:“整體是超出預期的。最典型的是,融資比預期的快;再比如,停車時的高精定位,行業的平均值是正負5cm,我們的預期也是正負5cm,但實際上已經做到了正負2cm。”
除了車端智能外,云端能力同樣是港口無人駕駛核心技術的關鍵。斯年智駕設計的全路徑調度系統,能夠有效解決路口通行、車輛排隊、多車死鎖等經典問題。
據何貝介紹,目前其無人集卡的工作效率是人工的85%-90%,有差距的原因在于速度不同——碼頭限速是30km/h,而有人駕駛有時會更快些。但不用吃飯、不用上廁所、不用交接班的無人車待能夠24小時運營時,在有效工作時間上就比人工駕駛的車輛長了。因此,哪怕車速不提升,整體運營效率也不比人工低。
目前,斯年正在思考的重點是,如何實現規模化運營。何貝說:“在2018年之前,無人駕駛能做個Demo就是個很有實力的公司了,而現在,我們需要證明產品的可靠性、魯棒性,是否具備批量化落地的能力。”
大榭碼頭IT部部長張冉去年在跟辰韜資本交流時提到,他們理解的規模化,“大榭碼頭總共有16個作業路數,至少要有3個作業路數以上采用無人駕駛作業,才算規模化。一路5-6輛車,3路就是15-18輛車。”而在何貝心目中,只有車隊規模達到了50-100輛,才算得上“規模化運營”。
據何貝介紹,斯年計劃在2021年底之前將在大榭碼頭部署的無人集卡車隊規模擴張到60輛以上;明年年初,將擴張至100輛。
當然,何貝也承認,在規模化擴張的過程中,要面對資金鏈安全、維修保養等挑戰,因此,必須要做好充分的準備后才能推進。
筆者問何貝:“在您眼里,衡量一個無人駕駛公司技術水平高低的指標有哪些?”何貝答道:“看你在無人化后能不能正常作業。并且,是真無人,而不是假無人。” 所謂“假無人”,即只是做了個 “沒有安全員”的車跑了一兩次的Demo。
斯年還計劃在2021年底或2022年初拿掉安全員。
無人集卡拿掉安全員,有一種變通的方案是,即劃出專門供無人駕駛車輛行駛的區域(封閉區域),并安排人在附近拿著遙控器操縱。但何貝認為,今后,港口在相當長的一段時間里,會是無人車和有人車混行,如果要碼頭劃出一片專供無人駕駛車輛行駛的區域,這不符合無人車常態化運營的條件;并且,把無人集卡限定在某個封閉區域跑,也需要對港口的基礎設施做大規模改造,這就跟AGV差不多了。
從“有人”到“無人”的過程,不會一蹴而就。斯年的“拿掉安全員”,并不依賴于對場地的改造,可以支持“無人”跟“有人”混行。
筆者問何貝:“在拿掉安全員的時候,車速會降低嗎?”何貝答道:“從研發的角度看,我們是希望車速能降低一些。”
車速降低了,碼頭不會介意效率降低了嗎?據何貝的解釋,在碼頭的水平運輸環節,對效率影響最大的是設備和車輛的配合度,車輛大部分時間都處于“停止”狀態(裝貨和卸貨環節),每趟的路程不到2公里,真正耗費在路上的時間很短,因此,車速在港口整體作業效率中所占的權重非常低。
何貝說:“下安全員,是一個循序漸進的過程。我們選擇自己做運營商,有一個很重要的原因正是我們可以自己控制節奏。”
去掉安全員,會率先從白班的車輛上開始,然后是夜班車。
四.斯年對重資產模式的觀察與思考
與港口賽道上的其他幾家無人駕駛公司相比,斯年定位為運營商、走重資產模式顯得“特立獨行”。除了做重資產模式“訂單一簽就是8年”、天花板更高外,還有沒有其他原因?
我們先看客戶需求,會發現一個很有意思的現象:港口方面更喜歡無人駕駛公司走重資產模式。
《甲子光年》在此前的一篇報道中提到,“盡管大多數港口運輸公司對無人駕駛渴望強烈,但對產品和技術的采購卻保持保留態度”。因為,無人集卡成本超過100萬,在技術還不成熟的階段,如果沒看到成熟案例,國企背景的港口大多不敢輕易冒這個險;即便是港口的一線工作人員有興趣嘗試,由于決策流程過于漫長,申請預算需要很長時間,最終也往往不了了之。
何貝也結合自己的親身實踐提到,輕資產模式做起來很吃力。“技術還沒有完全成熟的產品,客戶不會輕易投入幾十萬、上百萬來嘗試。”
終究得有一方持有重資產。無人駕駛公司想走輕資產,那碼頭方面就得走重資產,但實際上,碼頭長期來的運作模式是:碼頭把水平運輸外包給另外一個公司,自己也會買少量車輛,但是大部分的都是外包的。所以,對碼頭來說,自己采購車輛走重資產模式,已經超出了他們的“舒適區”。
在被問及“你們更希望無人駕駛公司以輕資產的方式切入還是重資產的方式切入”時,大榭碼頭的一位工作人員說:“希望車由他們買,他們自己做運營。因為,無人駕駛很復雜,每個環節都需要其他環節來配合,無人駕駛公司持有資產更能快速解決問題。”
蕭伊婷在去年10月份接受媒體采訪時還提到了碼頭不愿意買車的另一層原因:“他們會覺得創業公司很容易倒閉,我花很多錢買了你的車,幾年之后你的公司運轉不佳的話,我怎么辦?相反,如果無人駕駛公司自己持有重資產,港口方面就會比較放心。”
因此,僅從商務關系的角度考慮,對無人駕駛公司來說,走重資產模式,在起步階段要更容易一些。“讓客戶花大幾十萬、上百萬從你這買一輛車很難,但如果是讓他們按20元一箱支付運費,推進起來就順利得多。”
從技術的角度看,無人駕駛集卡的運營方需要對技術有一定的理解才行,但在很多情況下,第三方運營商由于對技術的理解不夠,很難做好,所以,運營交給開發技術的無人駕駛公司自己做,對港口來說也是最好的選擇。
此外,走重資產模式還有一個好處是:用什么樣的線控底盤,可以自己說了算,并且,可以只選有限的一兩款線控底盤,這樣,自動駕駛方案跟底盤的適配會相對容易;相比之下,如果是走輕資產模式,對港口的存量車進行改造,能“碰上”什么樣的底盤,無人駕駛公司是無法自己“做主”的。
以大榭碼頭為例,他們希望無人駕駛公司提供的改裝方案要“能適用于不同品牌、不同車型,包括柴油車、電動車、混合動力車”,因為港口有很多存量車輛,而這些存量車都往往不是同一個批次進來的,廠家和型號各不相同。這要求無人駕駛方案具有很強的“通用性”,而通用性可能導致方案做得很重,成本也不低。
在何貝看來,無論商業模式是什么,技術和產品最終都需要落實到運營服務上,區別僅在于運營是由客戶自己來做,還是由無人駕駛公司來做。從這個意義上看,賣技術方案,更像是一種“承上啟下”的形態。
筆者問何貝:“你們自己做運營,是否侵犯到碼頭傳統運輸公司的利益?如何解決避免沖突?”對這個問題,何貝的答案是:“寧波招商大榭碼頭的水平運輸,一直是包給集運公司做的,而對集運來說,內集卡業務凈利潤經常是虧損的,他們不得不通過外集卡來賺錢,進而降低整體虧損;因此,集運公司其實迫切希望把內集卡運輸業務剝離出去。”
作為一家初創公司,斯年如何克服重資產模式所需要面對的資金門檻?何貝說,他們計劃通過融資租賃來解決這個問題。
此外,比亞迪等新能源卡車公司,都迫切希望把電動卡車賣給港口場景,寧德時代也希望把換電模式鋪到港口場景,車輛本身的差異并沒多大,未來,誰能向港口賣多少卡車和電池,主要取決于誰選擇的無人駕駛合作伙伴更出色。因此,這些公司通常樂意跟港口賽道上的頭部公司合作。甚至會希望投資。寧德時代在礦山賽道已經投資了躍薪智能,或許,在港口賽道也可能會有所布局?

五.外集卡和干線物流,斯年的“星辰大海”
本文在前面提到,港口無人駕駛公司通常認為自己有能力在時機成熟的時候開拓外集卡和干線物流業務,斯年自然也不例外。斯年計劃,2023年啟動無人外集卡的規模化運營,在2024年啟動無人干線物流的規模化運營。
其中,“線控底盤可復用”是港口無人駕駛公司有信心向外集卡和干線物流場景拓展的最基礎理由。當然,各港口無人駕駛公司對線控底盤的標準及跟供應商聯合打磨的程度是有差異的。
在一些港口,無人集卡是被作為“特種設備”來管理的,不要求過車規,出了事是按照“生產事故”來處理的;而在大榭碼頭等地方,無人集卡是被作為“車輛來管理”的,要求過車規,出了事,也是由公安部門管理的。這意味著,斯年的車輛如果要在大榭碼頭規模化運營并做到前裝量產,是要過車規的。
車規是把雙刃劍:一方面,這種嚴苛的要求在某種程度上束縛了斯年的成長速度,另一方面,這也等于逼著斯年及其底盤供應商“苦練內功”,因而使其在做無人集卡的過程中打磨出的線控底盤更容易復用至干線物流場景。
此外,斯年在做港口無人駕駛運營服務中積累的很多商務資源,也可直接復用至其外集卡及干線物流業務中。
據何貝介紹,作為統一的“業主方”,港口運輸公司不僅掌握港口內部的運輸業務資源,還把控了港口間的短駁、短倒,以及眾多的專線港口外物流渠道。
港口的外堆場,有的貨主提貨比較慢,貨一直堆放在那里占地盤,會影響其他車輛的卸貨效率,港口特別希望把這些東西給運走,這個時候外集卡(干線物流)就派上用場了。
港口運輸業務有淡季和旺季之分,通常是旺季運力緊張,而淡季車輛和司機容易過剩,但港口運輸公司為了確保萬無一失,在做車輛和人員配置時只能按照旺季的需求來定,比如,平時可能需要100輛車,但需要準備140輛,其中40輛作為“冗余”,浪費極其嚴重。有了斯年這樣的無人駕駛運營商,那40輛的“冗余”車輛便可以免去了,在旺季,直接向斯年購買運力就行了。
況且,碼頭跟碼頭之間,往往是兄弟單位,會分享優質商務資源。這意味著,斯年只要服務好一個碼頭,就可以通過口碑進入其他碼頭。
說到商務資源,還有不容忽視的一點是:相比于純粹做技術方案的公司,提供運營服務的公司跟港口的日常往來更頻繁,關系也更密切,因此,在向干線物流場景拓展時,來自港口的商務資源就更多一些。
當然,僅由于線控底盤和商務資源,肯定不能確保港口無人駕駛公司向干線物流場景拓展成功。實際上,兩個場景的工況有很大差異,算法也不完全相同,拓展肯定是有很大挑戰的。此前,筆者對“拓展說”是有一些疑問(甚至是質疑)的,這次,筆者也把這些疑問拋給了何貝;對這些疑問,何貝都一一做了解答。
以下是筆者跟何貝對話的實錄——
九章智駕:
場景不同,數據便不能復用,所以,連“降維打擊”都很難成立,而斯年從港口場景向干線物流場景拓展,簡直就是“升維”了,如何確保“升維”能成功?
何貝:
從港口場景到干線場景,對技術的要求是一部分“升維”,另一部分則更簡單了。
由于車速更高,干線物流對傳感器探測距離及制動系統的要求都會更高,因此,這兩個模塊,都需要“升維”。
感知的難度,“是不升不降”。因為,目前用的感知算法基本都是基于數據驅動的深度學習算法,我們無論做港口還是干線物流,算法的模型并沒有本質區別(代碼和深度學習網絡是差不多的),在拓展場景后,只需用干線物流場景的數據來對原有的算法模型做訓練就行了。因此,壁壘在于我們能拿到多少干線物流場景的高質量數據,而不是算法怎么寫。
預測算法,不能說難度增加吧,至少工作量是增加了不少。因為,預測算法是強化學習算法+基于規則的算法,如果場景換了,不僅需要拿新場景的數據對預測算法模型做訓練,而且,算法的一些規則也需要重寫。
路徑規劃算法,高速場景實際上比港口場景更簡單了。因為,在港口,如果前面堵車了,無人集卡還得琢磨“怎么繞過去”,而在高速上,外集卡通常不需要超車,大部分情況下,只需要跑在最右側車道的最中間就行了。
定位系統,高速場景也比港口場景更簡單,因為,港口場景對車輛的橫向和縱向定位精度要求都很高,而在高速上,對縱向定位沒什么要求。
九章智駕:
無論技術的難度有沒有降低,現在,圖森、智加這些公司在干線物流場景的積累已經比你早了三年了,等你過幾年再入局,人家在數據量的積累上已經領先你五六年了,算法上的優勢應該比你們明顯得多,你憑什么能跟人家競爭呢?
何貝:
現階段,滿足干線物流場景需求的傳感器還不成熟,如激光雷達的探測距離達不到300米,而這些公司基于毫米波雷達和攝像頭收集的數據都是不夠用的;三年之后,等探測距離超過300米的激光雷達出來了,他們現在收集的數據就沒有多大用處了——算法模型需要用融合了激光雷達之后的數據來重新訓練,這意味著,算法架構也得改。
并且,線控制動和轉向機構都需要做好冗余才能上路,而根據采埃孚在跟圖森簽約時披露的信息,商用車的線控底盤要到2024年之后才能成熟。所以,哪怕是起步很早的無人駕駛卡車公司,往往也力不從心。
九章智駕:
所以,他們的供應商拖了他們的后腿,反而給了你們追趕的機會?
何貝:
供應鏈的瓶頸,不是任何一個無人駕駛公司能輕易突破的。
九章智駕:
在干線物流場景,相比于一開始就在這個賽道上的無人駕駛公司,斯年這種從港口場景起步的公司,有什么獨特的優勢嗎?
何貝:
指望一套無人駕駛方案能把中國的干線物流場景都跑完,是不可能的,還是得限定于某些特定區域,甚至是特定路線,至少是剛開始時最好如此。圖森在美國也只跑了一條路線(從東海岸到西海岸),在同一條路上反復跑,算法就會被打磨得很成熟,然后在這條路上越跑越順。
九章智駕:
Waymo在提出發力干線物流時也提到了“路線固定”。
何貝:
所以,無人干線物流的運營商,需要有能力或有資源去定義路線。
有一些無人駕駛公司雖然做干線物流,但不僅自己沒車,而且其戰略合作方也沒有自己的車,就是一個連接車主跟貨主的網絡平臺,大客戶給他什么路線,他就只能跑什么路線,根本沒能力自己去定義路線。如果有幾千輛無人卡車的話,就還好——每條路都會被不同的車各跑很多遍,再將不同車輛的路線數據匯總分享,最終系統對各線路的理解就比較深;但在只有幾十輛卡車,并且被分散在很多不同線路的情況下,很少有哪一條線路能被跑過很多遍,所以,系統在任何一條路上都沒法跑得很順。
而我們,由于車是自己的,在做干線物流的時候可以跟港口的合作伙伴協商,只跑某一些專線,因此,實現“無人化”的難度就低得多。