


自動駕駛已成為各大車企、人工智能企業爭相擠入、意圖實現突破的前沿領域。然而,自動駕駛急先鋒特斯拉引以為豪的FSD(完全自動駕駛)系統屢次發生事故;科技巨頭谷歌直接放棄了L2級別自動駕駛輔助系統的研發;智能汽車國產新勢力小鵬發布包含激光雷達的自動駕駛架構,卻遭馬斯克嘲笑。
自動駕駛的未來在哪兒?不少業內專家認為,車路協同是目前看來可行的發展方向,V2X(車輛與外界所有信息的交換)技術將成為自動駕駛的重要補充。上海自貿區臨港新片區正在這一領域加速布局,打造未來交通示范區。
提前決策,降低風險
“前方第二個路口出現事故,請以30碼以下車速通過或繞行。”車輛發出語音預警信息,車機屏幕上同時顯示相關信息。駕駛員提前應對,平穩通過“車禍”現場。
這是C-V2X無線信道測量及網絡性能測試中的一個場景。當然,道路上并未發生真實的車禍——測試規則制定方上研智聯在路口立桿上的白盒子預設了輪播信息,作為測試項目。
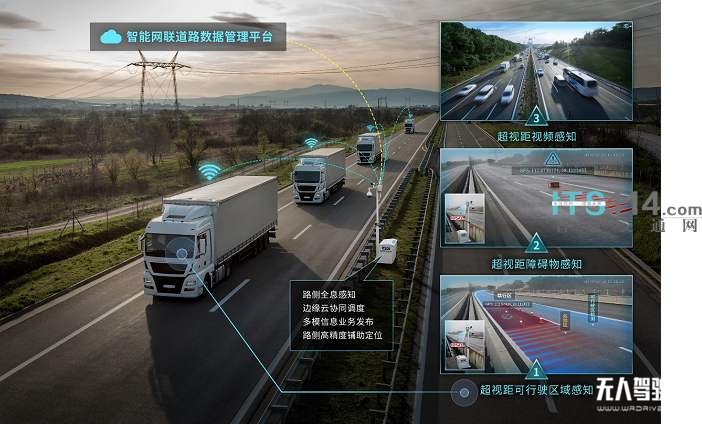
“這是RSU(路側單元),能將路況信息通過車聯網專用頻段點對點地傳輸到車輛。”上研智聯主任工程師汪大明說。而車輛只需安裝一個巴掌大的小盒子OBU(車載單元),即可接收信息。收到信息后,OBU會將決策輔助信息提交給駕駛員及車輛,供他們提前決策。
路口闖進行人,距離百米以上,OBU就已通過車輛進行報警。駕駛員直起身子,緊盯前方,右腳提前帶在剎車上,隨時做好制動準備。這樣的場景只有通過車路協同方能實現。行人預警、擁堵預警、危險預警、限速預警……這套系統現階段能做的已然不少。由于其收集信息基于道路基礎設施,比起車載系統更準確也更及時,往往能提前許多時間提醒駕駛員。汪大明表示,對于反應遲鈍的駕駛員群體,它能顯著降低行車風險。
難能可貴的是,該系統泛用性很強,絕大多數車輛都可使用,“安裝難度與裝行車記錄儀差不多”。汪大明告訴記者,一汽紅旗的一款即將上市的SUV車型上,還預裝了東軟集團研發的OBU,上市后將自帶這些功能。隨著車聯網與車路協同的發展,預裝模式或將成為新的主流。
布局多年,保持更新
C-V2X無線信道測量及網絡性能測試是工信部主導的針對車載終端的功能性驗證。這樣一個重要的行業測試之所以放在臨港,正是因為這里有最為豐富的應用場景。隧道、高速直道、高速彎道、地下停車場、城區路口、環島,甚至雨霧天氣模擬,應有盡有。
這些設施、場景已布局多年,并保持更新。上研智聯綜合管理部部長助理葉忍之介紹,目前,封閉測試區已覆蓋3.2平方公里,測試道路總計4.7公里,建設了約4萬平方米的核心測試廣場,支持20余種V2V、V2I的功能和性能測試,并實現了5G、LTE-V2X、全息感知路口、車路協同云平臺、智能信號燈管理平臺等的覆蓋,形成了“車-路-云”一體化測試環境。同時,上研智聯承擔了環湖一路數字化、智能化、網聯化升級改造,總長約8.5公里,共計14個十字路口和丁字路口,布設RSU設備38套,實現19個典型V2X預警場景,為自動駕駛、車路協同等技術的測試和示范提供有力的保障。
現階段,上研智聯所使用的RSU分兩種。一種需提前輸入輪播信息,可用于測試;另一種則由華為研發,通過5G通信,可由云端向RSU下發實時道路信息,再經其轉播到路面各車輛。“這套系統已有很好的實用價值。”汪大明舉例,前方道路擁堵,交通管制中心可以向周邊路段的RSU下發指令,通知路面車輛繞行。
由于交通數據量大,4G帶寬容量不夠,5G技術的配套不可或缺。但5G信號穿透力較差的缺點在隧道等封閉場景被放大,在測試區的隧道場景,工程師們發現,RSU與云端的通信產生了丟包率高、性能下降的問題。為此,他們針對隧道場景專門定制了信號放大器,使效果達到可用標準。
激光雷達,不好用嗎
然而,這些技術離實現真正的自動駕駛還很遠。車路協同的優勢,在于道路可以承載更多車輛因體積、成本等原因難以承載的傳感器,進而搜集更多、更精確的數據,交由車輛進行決策。
上汽集團智能駕駛環境融合系統經理殷偉表示,現階段,汽車智能駕駛大多基于三種傳感器:攝像頭、激光雷達、毫米波雷達。特斯拉信奉純視覺方案,只配合毫米波雷達輔助,堅決反對使用激光雷達與高精度地圖,認為“人類通過雙眼觀察路面就能駕駛車輛,那車輛也可以通過攝像頭與圖形分析算法實現智能駕駛”。馬斯克甚至公開表示:“激光雷達太蠢了,誰依靠它就會完蛋。”
但事實上,深度學習的圖形識別能力仍處于“人工智障”水平,遠遠不及人腦聰明。《麻省理工科技評論》資深編輯道格拉斯·海文發表在《自然》雜志上的文章《為什么深度學習人工智能這么好騙》中舉了一個典型的例子:一個特征明顯、人眼不可能認錯的“停止”路標,變換角度后就被AI認作了啞鈴。記者也曾親身經歷過一次特斯拉識別失敗導致的車禍:車道中間豎著路障,正在AP(自動輔助駕駛)狀態的Model 3完全沒有剎車的跡象,直接撞了上去,前擋風玻璃當場破裂。
而如果加上激光雷達,AI的識別水平就將得到質的飛躍。但它也并非萬能——遇上雨霧天或是大傾角坡道,激光雷達也“抓瞎”了。而且激光雷達成本高,用于乘用車難以商業化量產。
“把這些設備挪到道路上,問題都能迎刃而解。這也是車路協同的優勢所在。”汪大明說。
多源融合,解決難題
一個路口只需裝一套設備,空間充足,成本也高不到哪里去;路口的幾個傳感器,能為路過的車輛分攤大量數據采集任務——這就是車路協同下的自動駕駛。
由于這一領域需要大量數據積累,早在幾年前,上研智聯就開始布局探索智慧道路。同濟大學、上海智能交通公司在臨港智能網聯汽車綜合測試示范區內已打造了基于邊緣感知融合系統的全息路口。
記者看到,在測試區內的交通信號燈立桿上,掛載了各式各樣的裝置。有的一眼就能看出是攝像頭;另外幾個,經詢問得知,掛在低處的是激光雷達,掛在高處的是毫米波雷達。“激光雷達探測角度較小,因而要放得低一點。”汪大明介紹,“高精度攝像頭與毫米波雷達沒有這個問題,放在高處,覆蓋范圍也更廣——從這個路口甚至能看清、算出下一個路口所有交通參與者的位置、意圖。”
殷偉打了個比方:激光雷達就像用千里眼把所有角落都掃一遍,理論上周圍有些什么都能知道。毫米波雷達則專精于近距離測距,測試區內的毫米波雷達可精確到3厘米級別。視頻信息、激光雷達、毫米波雷達等多源信息融合,能夠有效提高交叉口通行效率、改善行人過街的安全、為智能車輛主動提供路側交通信息。而運用邊緣云系統,各路口節點之間可以形成聯動,讓路面車輛提前多個路口就得知決策輔助信息。
事實上,這套系統馬上就要走出封閉測試區,鋪設于開放道路。臨港新片區環湖一路智能網聯公交及智慧道路測試示范線已于此前正式啟動測試,來自中國中車、深藍科技的自動駕駛公交將行駛在滴水湖畔。中國中車智能駕駛工程師張勇告訴記者,車輛正是在臨港智能網聯汽車綜合測試示范區內測試了3個月,才有底氣啟動路測。






















