


8月13日消息,阿里巴巴達摩院宣布,其自研感知算法實現了對低線束LiDAR(激光雷達)的高線束模擬,間接將LiDAR線束量提升3倍以上,實現低成本普通激光雷達替代高成本雷達。能探測障礙物的激光雷達是自動駕駛車輛最重要的“眼”,此算法突破相當于用“低像素相機拍出單反相機效果”,可大幅降低自動駕駛感知部件成本。
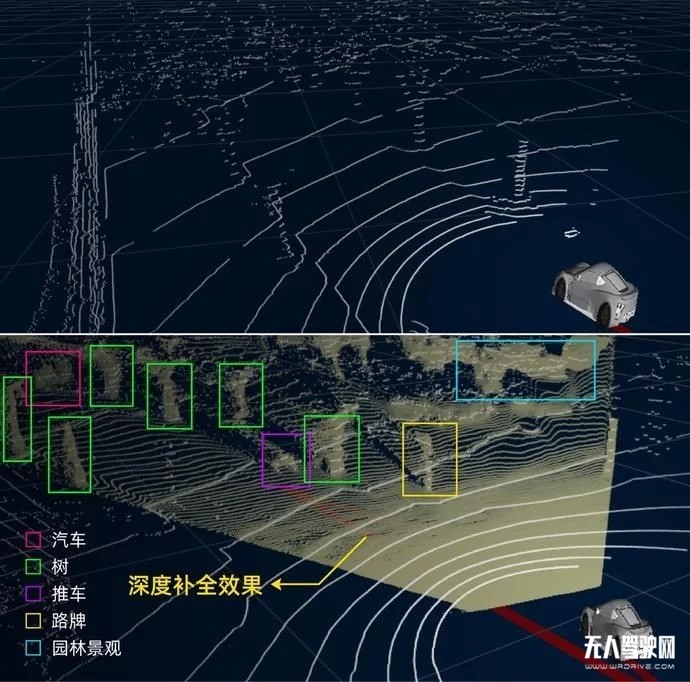
在自動駕駛實際落地場景中,往往需要高密度的LiDAR才能滿足感知需求,而64線以上LiDAR 成本居高不下,成為自動駕駛大規模商業化瓶頸之一。達摩院自動駕駛實驗室環境感知算法能結合攝像頭圖像,對低線束LiDAR點云進行深度補全及語義識別,實現更稠密的激光雷達點云圖3D重建效果,不僅可更精確地讀取障礙物距離及形狀等信息,也可更精準判斷其類別信息。
在精度指標上,達摩院采用低線束激光雷達輸入,實現了業內采用高線束激光雷達輸入的平均水平,50米內障礙物距離信息讀取平均誤差為25厘米左右,同時,達摩院進行深度補全任務時可達到100fps(每秒傳輸幀數)的處理能力。






















