MIMIR自動駕駛系統僅用一個普通攝像頭即可構建自動駕駛汽車所需的3D場景,實現3D感知。Ralient公司在You Tube上發布了一段由單個攝像頭拍攝的視頻,視頻展示了該公司的MIMIR自動駕駛系統是怎樣檢測出路上車輛的尺寸、運動狀態和方向。
更神奇的是,MIMIR自動駕駛系統不僅可以測算出本車與其他車輛之間的距離,并且能夠在不知道上一幀的情況下分別處理每一幀畫面,進而通過跟蹤其他車輛,準確測算出其他車輛的速度。
據悉,目前的汽車自動駕駛3D感知的方法存在成本高、探測距離近、不能測算車輛距離和速度等方面的缺點。Ralient研發的基于神經網絡自動駕駛系統或將解決自動駕駛3D感知所遇到的難題。
一、Ralient推出新的自動駕駛系統 已經展開車輛上路測試
近日,俄羅斯一家名為Ralient的自動駕駛初創公司推出基于神經網絡開發的自動駕駛系統,該系統名為MIMIR,僅用一個普通攝像頭即可構建自動駕駛汽車所需的3D環境,實現3D感知。
Ralient在You Tube上傳了一段僅由單個攝像頭拍攝的視頻,視頻中展示了該公司的MIMIR自動駕駛系統是怎樣監測出路上車輛的尺寸、運動狀態和方向的,該公司認為一個雷達或者攝像頭就足以收集復雜的道路信息。
不僅如此,MIMIR自動駕駛系統還可測算出本車與其他車輛之間的距離,并且能夠根據攝像頭所拍畫面,測算出其他車輛的速度。
Ralient已經展開了MIMIR自動駕駛系統的上路測試,測試其對被殘缺道路標識的識別能力。
另外,這家自動駕駛初創公司還在研發名為“R-Shuttle”的無人駕駛汽車,該公司不會將高精地圖作為汽車自動駕駛的核心,因為他們認為高精地圖易受惡劣天氣影響,并不能滿足實用化的要求。
二、主流技術路線成本高昂 最高可達40余萬元
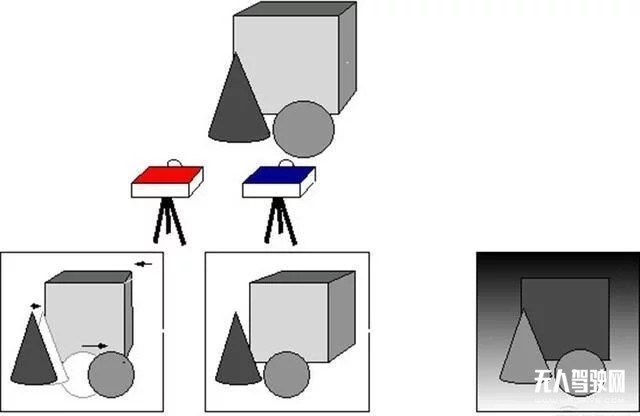
據了解,現在為自動駕駛提供3D感知的技術主要有,立體視覺、RGB-D和Lidar三種技術路線。
立體視覺的工作原理與拍攝3D電影類似,使用兩個或兩個以上不同位置的攝像機進行環境圖像的收集工作,之后通過兩個角度拍攝的圖像差異計算目標物體的距離。此路線所需的硬件簡單,只需要兩個攝像頭,但是測算目標物體的速度和位置精度方面存在問題。
RGB-D可以看做是增加了可探測目標物體的距離功能的2D攝像頭,工作原理是,利用光到內部傳感器的投射時間計算與目標物體的距離。此項技術路線成本相對較低,但易被干擾和遮擋。
Lidar即激光雷達,并且大多數的3D Lidar傳感器是多線的(最多64線),它利用發射的激光脈沖測算與目標的距離。此項技術路線探測距離遠、精度高,但過于笨重,而且成本較為昂貴,每臺64線的Lidar需要約6萬美元(約合人民幣42.5萬元)的成本。
Ralient公司表示,基于神經網絡的MIMIR自動駕駛系統成功開發,意味著可以使用普通智能手機的攝像頭取代激光雷達等昂貴的探測設備。
結語:神經網絡將助力自動駕駛發展
目前,自動駕駛非常依賴于對場景的3D感知,而三種主流的感知技術路線又存在這樣或那樣的問題。
Ralient利用神經網絡開發的MIMIR自動駕駛系統解決了探測精度等方面的問題,還大幅降低了成本,擁有較為廣闊的發展前景。
據悉,Ralient公司已經開始對MIMIR自動駕駛系統進行了上路測試,一旦驗證該系統成熟,神經網絡將向更高級別發展。