


在快遞包裹算由A點及B點的分揀過程中,小機器人要保證不出現錯誤分揀、不相互碰撞、不發生擁堵同時還要自主選擇最有效率的運送路線,顯然需要一個系統的全力支持。在這個系統中,小機器人并非單打獨斗,除了要準確獲取快遞包裹信息外,相互之間、與運輸線路和收件口也要有必要的信息交流,甚至還要準確接受系統的指令并反饋自己收集的信息。沒有這個系統的支持,單靠小機器人自身的信息收集、處理能力,工作效率肯定會大受影響。
這個高效的分揀系統,僅僅是一個簡單系統,工作場景簡單,小機器人交換信息的對象數量也很有限,且信息也不復雜,小機器人需要完成的任務也相對簡單,外部環境的干擾也幾乎可以忽略不計。不過,這個系統雖然簡單,但卻足以幫助人們更準確地認識一些比較復雜的系統,比如,現在比較熱門的無人駕駛技術(包括無人駕駛網約車等),就需要將其致于一個復雜系統——城市地面智能客運系統——中考量,才能更準確地把握其發展方向并更有效率地推動其進步。
就基本功能而言,無人駕駛技術和分揀快遞包裹的小機器人實在沒什么質的區別,都是把人或貨物安全、準確、高效地由一地運送到另一地。要順利完成這個工作,不斷推動無人駕駛技術的進步固然重要,但整個系統的改造和技術進步,顯然更重要。
從這些年無人駕駛技術的發展看,絕大部分資源都集中于對車的改造——由有人駕駛逐漸向無人駕駛的過渡。經過持續的改造,單車無人駕駛技術已經取得了明顯進步,無論是信息收集能力,還是信息處理能力,都有了相當提升。這種能力的進步,也直接導致許多城市陸續開通了路測道路(比如北京市就開放自動駕駛車輛路測道路33條,總長度達到105公里),這又進一步促進了單車能力的提升。
比較新的消息是,滴滴在上海開通了無人駕駛網約車測試服務,從實際情況看,雖然乘客體驗還大有提升空間,但無人駕駛汽車顯然距離普通人的現實生活又跨近了一大步。不過,要想使無人駕駛技術盡快實用化,除了繼續著力提升單車技術能力外,顯然還要大力強化整個交通系統的改造,畢竟系統的支持,才是最根本、最有力的支持,才是無人駕駛技術實現實質性提速的基礎。
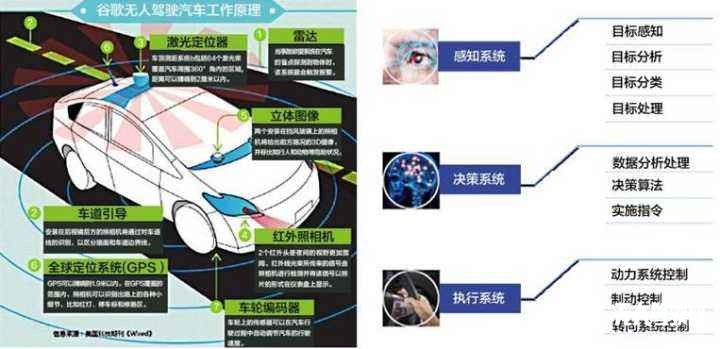
從既有經驗看,一輛無人駕駛汽車即使安裝了32個、64個、甚至更多的探測頭,其信息的直接搜集能力也是有限的,關鍵還受到周圍環境的極大制約;另外,相對于現有信息處理技術而言,單車的信息收集量級顯然過低,這既造成處理能力的浪費,也直接影響信息處理結果的準確性。這些技術限制,導致無人駕駛汽車的安全性和效率很難令人滿意。要徹底改變這種局面,顯然要加快全系統的改造。比如,要讓更廣范圍內、更多的交通系統節點(交通信號設施、監控鏡頭等),能夠向無人駕駛汽車發送信息,無人駕駛汽車能夠接收、處理并反饋這些信息,同時調整自己的運行方案。
有了這種智能系統的近乎全方位的支持,再加上無人駕駛技術的進步,乘客體驗才可能得以實質性提升,無人駕駛汽車才能更快地走進現實生活。






















