


隨著國家11部委聯(lián)合出臺了《智能汽車創(chuàng)新發(fā)展戰(zhàn)略》,“車-云-路”協(xié)同方案正式成為了智能駕駛的“中國路徑”。可以預(yù)見的是,重數(shù)據(jù)與強(qiáng)融合的發(fā)展方式,將成為“中國路徑”的核心策略。
近日邀請了覺非科技CEO李東旻,就智能駕駛“中國路徑”的演繹與發(fā)展進(jìn)行了分享。以下為李東旻的演講實(shí)錄,新智駕進(jìn)行了不改變原意的編輯:

智能駕駛產(chǎn)業(yè)的中國路徑,尤其是“車、云、路協(xié)同模式”的落地,可以說有非常廣闊的發(fā)展前景。
以下我會從4個方面來跟大家分享覺非科技的一些實(shí)踐經(jīng)驗(yàn)。
首先,整個智能出行時代本身就有巨大的變革,如同 PC時代的網(wǎng)站爆發(fā),智能出行時代正在崛起。智慧出行時代大大拓展了數(shù)據(jù)源邊界。
無論是車端數(shù)據(jù),亦或是道路數(shù)據(jù),都呈現(xiàn)指數(shù)級增長,本質(zhì)上智能出行帶來的是 LBS(基于位置的服務(wù))數(shù)據(jù)的大爆發(fā)。
自動駕駛行業(yè)發(fā)展出的三種不同切入路徑
隨著這些數(shù)據(jù)的變化,過去全球范圍內(nèi)演進(jìn)出了有三條不同的自動駕駛路徑。
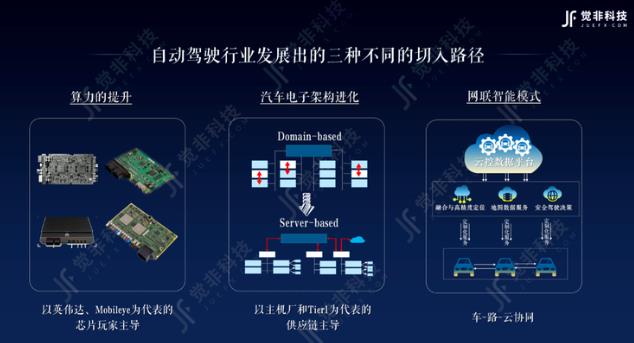
第一個路徑是以單車算力提升為核心的,也稱之為硬件模式,或者單車智能模式,同時又可以根據(jù)傳感器數(shù)量稱之為5+1模式。所謂5+1就是五個硬件+一套軟件,這是L4級別無人駕駛的標(biāo)配。從GPU到毫米波雷達(dá)、激光雷達(dá)、攝像頭、到綜合慣導(dǎo)設(shè)備。一套軟件就是自動駕駛標(biāo)準(zhǔn)化的三段論:感知、決策和控制這三套系統(tǒng)。
而以單車智能為主的,都是以硅谷為主導(dǎo)。它的推進(jìn)方式是顛覆性的,并且這條路徑只關(guān)注L4以及L5的無人駕駛。
另一條路徑是以主機(jī)廠和一級供應(yīng)商為代表的供應(yīng)鏈主導(dǎo)的模式。它的核心是以銷售整車和設(shè)備為目標(biāo),整體采用漸進(jìn)式的方式賦予汽車智能。
然而不管是“顛覆式”還是“漸進(jìn)式”的發(fā)展路徑,汽車產(chǎn)業(yè)的底層結(jié)構(gòu)都沒有發(fā)生質(zhì)的變化。
第三個模式是網(wǎng)聯(lián)智能的模式。這種模式對于這種基礎(chǔ)設(shè)施建設(shè)的要求非常高,但其實(shí)是最適合中國的技術(shù)路徑,也是最有可能實(shí)現(xiàn)智能出行規(guī)模化落地的方案。
那么這三條路徑分別演進(jìn)出來的產(chǎn)品形態(tài)是什么樣子的?
這里我們不用L1或者L2這種技術(shù)化的表達(dá)語言,而是從市場落地的角度,來把現(xiàn)有的智能駕駛產(chǎn)品進(jìn)行坐標(biāo)系表達(dá)。以乘用車和商用車作為橫軸,縱軸用高速和低速來區(qū)分。
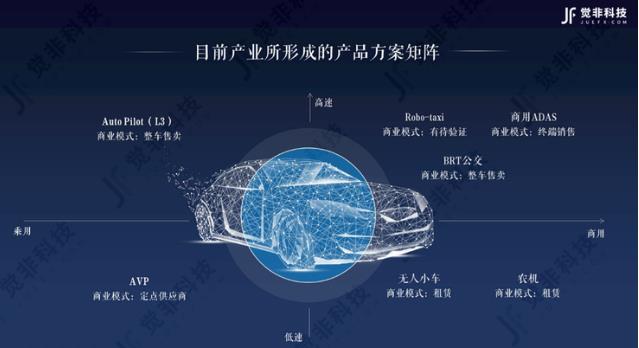
在縱軸上,可以從坐標(biāo)系里看到,目前在商用車的高速場景里,以商用物流車輛加裝ADAS為主,商業(yè)模式是以銷售終端為主。還有快速公交線路甚至更高級別的智能駕駛技術(shù),整體也是以整車售賣為主。 乘用車方面落地的產(chǎn)品數(shù)量相對較少,目前真正落地的是AVP產(chǎn)品。在高速場景里基本是特斯拉的Auto pilot一枝獨(dú)秀。
可以看到,基于單車智能的模式,在落地方面已經(jīng)到達(dá)了增長瓶頸。后續(xù)的每一點(diǎn)進(jìn)展都需要消耗不成比例的計算資源和其他資源,這個稱之為第一增長曲線已經(jīng)接近結(jié)束了。 目前行業(yè)的機(jī)會在于第二增長曲線,也就是不依賴于硬件算力提升為代表的“車、云、路協(xié)同”方案正在逐漸興起。
此前,以硬件和傳感器為主的技術(shù)路徑,雖然過去也落地了一些產(chǎn)品,但也發(fā)生了非常多的問題。經(jīng)典的案例就是Uber自動駕駛撞人致死的案例。新聞報道里也有其自動駕駛系統(tǒng)決策的日志。
Uber的目標(biāo)識別的模塊在不停的跳躍,在“其他”和“車輛”類別之間搖擺不定。可以看到系統(tǒng)識別的穩(wěn)定性和可靠性是非常差的。因此很不幸,在最后的1.2秒鐘,受害者還沒有被真正識別為一個行人,最終釀成慘劇。
可以看到,這種基于硬件和傳感器實(shí)時感知的自動駕駛路徑,它的可解釋性、可靠性是有待考量的。我們必須追問,訓(xùn)練一個機(jī)器要訓(xùn)練到什么樣的程度和水平,才能夠把性命托付給一個機(jī)器?
同時,這種無人駕駛酷炫外衣的背后,后備箱里面的這些風(fēng)景其實(shí)并不是那么美觀。通常一輛無人駕駛的車輛后備箱里,需要3千瓦以上的電源支撐才能讓這些強(qiáng)算力的硬件正常運(yùn)轉(zhuǎn)起來。
僅靠單車算力這種依賴電力消耗的模式,很有可能完全不足以支撐未來的商業(yè)化。除了后備箱,車輛旁邊可能還有一個計算機(jī)背景的護(hù)送員,護(hù)送員通常薪酬比較高,遠(yuǎn)遠(yuǎn)高過一個專車司機(jī)的薪水高。
基于后深度學(xué)習(xí)的覺非科技方案
因此從技術(shù)路徑來看,從單車智能模式發(fā)展到目前水平、產(chǎn)品化落地的情況來看,我們還有哪些其他方向可以去做?我們需要彌補(bǔ)在邏輯推理里面假設(shè)不成立帶來的問題,而這其實(shí)就是深度學(xué)習(xí)算法,這是在自動駕駛里面我們今天面臨的一些不足。
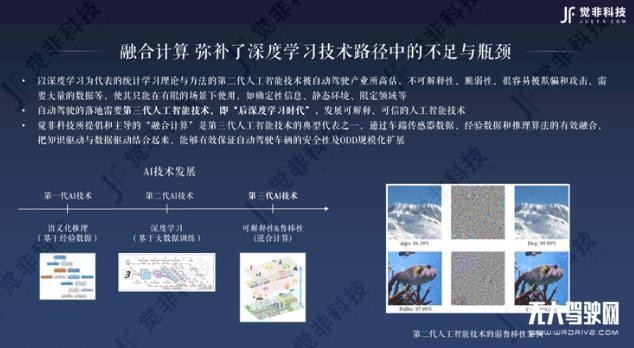
清華大學(xué)人工智能研究院的院長張鈸院士提出,整個自動駕駛的落地需要進(jìn)入后深度學(xué)習(xí)時代。什么是后深度學(xué)習(xí)?就是說通過“車、云、路協(xié)同”的方式,將經(jīng)驗(yàn)類的,具有較好穩(wěn)定性、可靠性的數(shù)據(jù)以及邊緣推理算法,再加實(shí)時感知數(shù)據(jù)聯(lián)合在一起,進(jìn)行驅(qū)動,發(fā)展成解釋性比較強(qiáng),可依賴的人工智能技術(shù)。
此前基于深度學(xué)習(xí)的人工智能的技術(shù),可以輕而易舉通過人工構(gòu)造的方式加以改變。比如一個阿爾卑斯山的照片加上了一些人工構(gòu)造的底噪,最后機(jī)器算法就會識別為一條狗。可以想象,一個基于實(shí)時感知的車輛,不管是激光雷達(dá)還是攝像頭,如果把路邊的一個限速牌識別成岔路口,這會帶來多么危險的后果。
所以從覺非科技的角度來看,不能完全甚至絕大部分依賴實(shí)時感知的傳感器,需要發(fā)展出來基于后深度學(xué)習(xí)時代的內(nèi)容,把一些穩(wěn)定性比較高的數(shù)據(jù)跟實(shí)時傳感器相融合實(shí)現(xiàn)更可靠的自動駕駛。
我們做過一個演示。后深度學(xué)習(xí)加上高精地圖,能夠讓一輛普通的車輛實(shí)現(xiàn)什么樣顛覆式變化?
一輛非常普通的車輛,沒有做過任何改裝,唯一的改變是在車輛后視鏡的下面架了一個手機(jī),然后手機(jī)通過USB線連接到了后視鏡里面汽車的CAN總線上。通過這根USB線,實(shí)現(xiàn)了手機(jī)控制這輛普通汽車的所有感知過程。 這是需要用戶花4萬到5萬才能實(shí)現(xiàn)的高級輔助駕駛功能,包括沿車道行駛、高速公路并道等。
從技術(shù)角度而言,這是怎么實(shí)現(xiàn)的?我們在手機(jī)里面存儲了數(shù)據(jù)和感知算法,尤其是融合感知算法。脫離硬件本身,手機(jī)里面存儲的數(shù)據(jù)具備了一個零到無窮遠(yuǎn)的超視距感知能力。我們把實(shí)時感知數(shù)據(jù)加上車道線的高精度地圖數(shù)據(jù),同時把車輛本身的運(yùn)行數(shù)據(jù)(慣導(dǎo)設(shè)備、GPS信號)實(shí)時狀態(tài)相融合,能夠就實(shí)現(xiàn)一個魯棒性和安全性都非常之高的解決方案。
就像給這輛車?yán)L制了一個看不見的鐵軌,讓車沿著非常安全穩(wěn)定的鐵軌行使,不受惡意攻擊的影響。
覺非在這條路徑上面跟合作伙伴宇通客車一起合作了兩項方案。
第一個方案是AR交互系統(tǒng),部署在一個L4級別的無人駕駛的小巴上。在車內(nèi)22寸的液晶屏上面,乘客能夠清晰地看到車輛是在怎么感知周圍環(huán)境的。 不論是公交車、行人、自行車還是其他的移動物體,都可以準(zhǔn)確的在界面上顯示出來;同時也會向乘客展示車輛的行進(jìn)方向、路徑規(guī)劃、目標(biāo)物體的測距。
第二個方案是跟宇通合作的是比較創(chuàng)新的工作模式,面向快速公交車輛實(shí)現(xiàn)全場景的融合感知。全場景融合感知,就是在不論刮風(fēng)下雨還是重度霧霾等異常惡劣天氣情況下,快速公交車都能夠?qū)崿F(xiàn)360度無死角的進(jìn)行感知。
我們也會用到很多傳感器,基于這套感知硬件,我們把自己核心的技術(shù)比如道路的語義分割、圖像與激光點(diǎn)云融合在一起,形成一個典型的多傳感器融合技術(shù)。
多傳感器融合能力可以通過攝像頭對物體進(jìn)行識別,也可以通過激光雷達(dá)對物體進(jìn)行測距,但不依賴于某一個傳感器硬件。這是我們和宇通,在實(shí)踐車和路之間協(xié)同的融合感知方案。
很多朋友會說,未來中國車云路協(xié)同落地的時間點(diǎn)可能很慢。其實(shí)國內(nèi)在政策層面已經(jīng)制定了C-V2X的落地白皮書。到2025年,一半的新車將會具備C-V2X功能。現(xiàn)在每年2000多萬新車銷售,其中至少一半的車有這個功能,具備巨大的市場潛力。通過我們的路徑來改造車,能夠?qū)崿F(xiàn)比較好的車云路協(xié)同。
覺非科技的車云路協(xié)同
覺非的整體車云路協(xié)同軟硬件一體化架構(gòu),是經(jīng)過實(shí)踐總結(jié)出來的結(jié)果。這個架構(gòu)最上層的部分是基礎(chǔ)設(shè)施。核心層面包括定位、通訊、路側(cè)設(shè)施三個基礎(chǔ)設(shè)施。
那么車路云之間怎么協(xié)同?
目前國內(nèi)在5g網(wǎng)絡(luò)層面已經(jīng)達(dá)到標(biāo)準(zhǔn)化,接下來要做的就是如何實(shí)現(xiàn)協(xié)議上車的過程。值得一提的是,C-V2X協(xié)議和5g協(xié)議所用的頻段都是5000赫茲以內(nèi),也就是說車上裝載了5g接收芯片以后,自然就擁有了接收C-V2X協(xié)議的能力,也是連接路側(cè)單元的能力。
從定位維度來看,中國過去成規(guī)模體系的定位系統(tǒng),除了衛(wèi)星、北斗衛(wèi)星以外就是路側(cè)的差分定位基站。目前國內(nèi)主要有兩個差分定位基站的提供方。老牌的是千尋,在全國布了2000多套基站。而新發(fā)展起來的就是中國移動,現(xiàn)在中國移動可能已經(jīng)成為了國內(nèi)第一大差分定位基站運(yùn)營商,并且預(yù)計在2020年新建25萬個5G差分定位基站。
這些基礎(chǔ)設(shè)施架構(gòu)、硬件架構(gòu),對于中國的車云路協(xié)同的落地是一個非常大的利好。 相當(dāng)于從基礎(chǔ)設(shè)施層面解決了很多依賴性比較高,可靠性比較強(qiáng)的基礎(chǔ)設(shè)施。 這是基礎(chǔ)層。
從軟件層和硬件層來看,對于車上傳感器、天線、制動等硬件部分都是交給主機(jī)廠。而在軟件和云端部分,尤其是軟件感知、定位和規(guī)劃這三個部分,實(shí)際上這才是“車、云、路協(xié)同模式”能夠發(fā)揮真正價值的地方。覺非科技沿用的技術(shù)路線是可靠性比較高的高精地圖作為容器,把上層的多傳感器融合放在容器里面,統(tǒng)一計算實(shí)現(xiàn)可靠性更高的決策引擎。
覺非科技的定位,是面向整個智能出行產(chǎn)業(yè)打造一個數(shù)據(jù)引擎, 形成“雙輪驅(qū)動”的模式。一方面針對運(yùn)營場景端,通過高精度數(shù)字化能力進(jìn)行賦能。另一方面,針對智能終端,通過車端傳感器數(shù)據(jù)、路端傳感器數(shù)據(jù)與高精地圖數(shù)據(jù)進(jìn)行有效的時空同步與融合,把知識驅(qū)動與數(shù)據(jù)驅(qū)動結(jié)合起來,提供可靠、精準(zhǔn)的智能化解決方案,能夠有效保證自動駕駛車輛的安全性。
我們的數(shù)據(jù)引擎進(jìn)入市場以后,解決了自動駕駛產(chǎn)業(yè)的很多痛點(diǎn)。比如感知在不完全依賴于激光雷達(dá)的前提下,做到激光雷達(dá)和攝像頭在亞毫秒之間的同步,彌補(bǔ)了單車智能模式的一些天然不足。
總結(jié)下來,覺非科技有4個技術(shù)上的優(yōu)勢,分別是數(shù)字化的道路引擎、多元數(shù)據(jù)歸一化引擎,跨平臺、跨終端的道路推理引擎,以及通過云端跟車端之間建立起來大數(shù)據(jù)分發(fā)引擎。
接下來給大家分享我們跟中國移動實(shí)現(xiàn)的車和基礎(chǔ)設(shè)施之間的差分定位效果。
當(dāng)車輛在往道路中間并道時,行駛到車道中心。在高精度地圖上,可以看到車輛也在進(jìn)行非常準(zhǔn)確的行駛。車本身沒有加裝超過1萬元以上的激光雷達(dá)和感知設(shè)備,唯一裝的是中國移動地面差分定位基站的接收器,通過接收器上面運(yùn)行的覺非提供的數(shù)據(jù)引擎算法,讓這輛車實(shí)現(xiàn)了厘米級別的高精度定位。
除了車路之間的協(xié)同,《智能汽車發(fā)展戰(zhàn)略》里也提到構(gòu)建先進(jìn)的基礎(chǔ)設(shè)施,然后重點(diǎn)推進(jìn)大數(shù)據(jù)云控基礎(chǔ)平臺的建設(shè)。 為什么云控平臺這么重要?
云控平臺就是從云端形成數(shù)據(jù)全集,然后通過云來連接路上行駛的車輛。可以理解為,這些車輛是一個邊緣端運(yùn)行的設(shè)備。邊緣端設(shè)備和云控數(shù)據(jù)平臺之間的互動形成融合模式,能夠面向多個智能終端、多個出行場景,提供全局的解決方案。
未來傳統(tǒng)車輛也會真正變成邊緣端設(shè)備。 車輛通過云控平臺連接以后,可以實(shí)現(xiàn)車輛實(shí)時在網(wǎng),永不掉線。現(xiàn)在每臺手機(jī)都有工信部聯(lián)網(wǎng)準(zhǔn)入認(rèn)證,相信不久的將來,隨著云控平臺的落地和5g網(wǎng)絡(luò)的連接,每一輛車也都會一個準(zhǔn)入環(huán)節(jié)。
總結(jié)一下,我認(rèn)為,從技術(shù)到量產(chǎn)落地需要具備的充要條件有四點(diǎn)。
第一點(diǎn),在產(chǎn)業(yè)上一定要有需求,有痛點(diǎn)。過去很多的自動駕駛方案提供的大多是錦上添花的功能。消費(fèi)者看乘用車的時候,最終還是要看安全。
第二點(diǎn),在經(jīng)濟(jì)上面,不管是技術(shù)、硬件還是軟件,方案一定要可規(guī)模化部署。一臺車和五臺車實(shí)現(xiàn)自動駕駛可以通過改裝方案。但實(shí)際上這種方式真正能帶來規(guī)模化嗎?并不能,它還涉及到很多供應(yīng)鏈的供貨問題、原有生產(chǎn)線改造的問題,這是從供應(yīng)鏈的角度來思考的。任何自動駕駛的技術(shù)在落地時一定要實(shí)現(xiàn)不同硬件的兼容。
第三點(diǎn),在競爭層面,對于很多創(chuàng)業(yè)型公司來說,需要建立自己的競爭優(yōu)勢。互聯(lián)網(wǎng)時代一直在講閉環(huán)的迭代。閉環(huán)的迭代就是發(fā)布的技術(shù)、產(chǎn)品要能夠通過客戶用戶,將反饋和數(shù)據(jù)收集回來。
自動駕駛對于傳統(tǒng)主機(jī)廠模式的意義,是在于用軟件來定義硬件。因此這里面如何去建立閉環(huán)迭代,是需要精心設(shè)計和思考的。 有哪些合作能帶來數(shù)據(jù)閉環(huán)?因此除了數(shù)據(jù)閉環(huán)之外,還要考慮的是怎么建立產(chǎn)業(yè)聯(lián)盟。
最后一點(diǎn)是技術(shù)層面,一定要提供高可靠性的解決方案。篤定某一條路徑和一個硬件,實(shí)際上是一個風(fēng)險非常高的選擇。盡管這可能給某家公司在短期里帶來一些硬件收入。 但從終局角度而言,如果無人駕駛成為規(guī)模化和普遍化,人、車、路協(xié)同成為現(xiàn)實(shí)之后,市場的商業(yè)邏輯還是不是靠硬件的方式來驅(qū)動?
因此從經(jīng)濟(jì)、產(chǎn)業(yè)、競爭和技術(shù)四個層面, 是實(shí)現(xiàn)技術(shù)到產(chǎn)品量產(chǎn)過程中需要思考的四個方面。






















