


1 概述
智能輔助駕駛系統(tǒng)致力于改善交通安全,計算機視覺起到極其重要的作用,它可以檢測到感興趣的交通物體,如車輛和行人。該系統(tǒng)需要在戶外場景下的移動平臺上進行實時處理,目前仍是計算機視覺研究領域中的前沿技術。由于行人外觀的多樣性,如不同的姿勢、衣服、距離、角度以及城市環(huán)境的復雜性,因此行人檢測要想取得理想的效果存在較大的困難。
大多數關于二維圖像中行人檢測的方法都是基于特征選擇和機器學習的。下面是一種簡單的將分類器用在二維圖像中的方法:在圖像中確定一條水平的地平線,在直線以下部分的像素都屬于路面,然后根據行人的尺寸大小在路面上所有可能存在行人的區(qū)域進行檢測。但這種方法有一個前提,即攝像機的姿勢是固定的,攝像機與路面之間的夾角是不變的,也就是說,上述過程中在圖像中所確定的地平線是固定的,在每一幀圖像中都是同一個位置。顯然,由于車輛的運動和路平面的不規(guī)則性,這樣的假設與事實相距甚遠,特別是在城鎮(zhèn)交通環(huán)境中。因此為了減少攝像機角度變化所帶來的影響,在上述方法中需要增加大量可能存在行人的待檢測窗口。另外,行人本身的類內變化性比較大,分類器需要用到幾千個特征。以上原因使得計算的時間開銷非常大。本文參考文獻[1]中關于智能輔助駕駛系統(tǒng)中行人檢測的理論,提出一種改進的基于車載攝像機角度估計的方法,根據行人的尺寸大小減少待檢測窗口大量。采用類Haar特征以及Real AdaBoost作為機器學習方法的分類器設計方案。
2 攝像機角度估計與區(qū)域提取
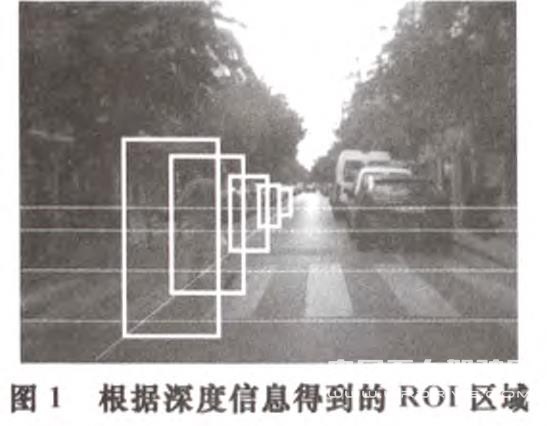
本節(jié)的主要目的是通過擬合路平面,對攝像機的角度進行估計,最后定義一系列的ROI區(qū)域,即待檢測窗口如圖1所示。基于立體視覺的解決方案將問題固定在攝像機的高度以及角度的變化上,高度和角度都是相對于路平面而言的。攝像機在yaw角度和roll角度的變化可以忽略[2]。本文方法與文獻[1]中的方法雖然相似,但是計算時間卻大為減少。
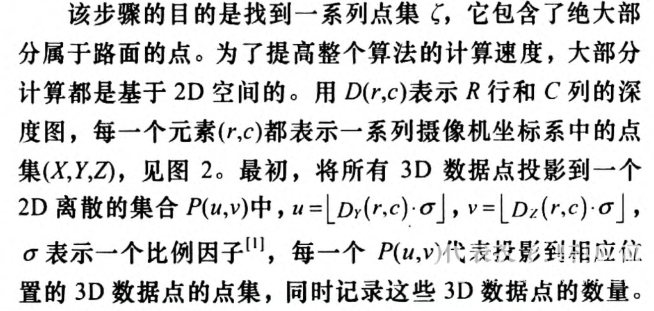
2.1 3D數據投影及數據塊的選擇


2.2路平面方程的擬合
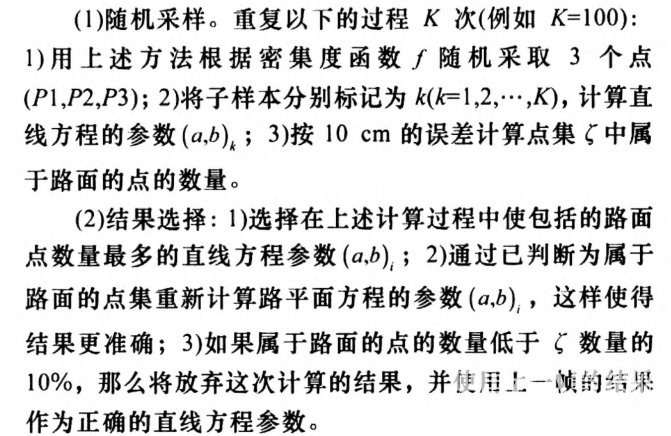
接下來將屬于路面的重心點投影到YZ平面,然后對YZ平面上的這些點用最小二乘法進行直線擬合。為了加快計算速度,下面采用10 cm誤差的范圍判斷重心點是否屬于路面,如果重心點不屬于路面,則不參與下面的計算。該過程如下:
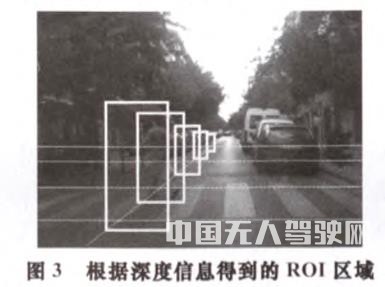
最終,通過這個直線方程,正確估計出攝像機相對于路面的角度及高度。由最小二乘法線形擬合理論可知,這比文獻[3]中將所有重心點用來擬合路平面方程的方法在計算時間上大為減少。然后,在X方向上和z方向上每隔0.5m放置一個ROI區(qū)域,其大小為(0.75x1.5)m~(0.95×0.9)m。這些窗口共有2 000個左右,然后通過分析判斷這些待檢測區(qū)域的空間中包含的點數據是否大于閾值a,a為隨深度變化而線形變化的值。本文實驗中,圖像大小為640x480像素,定義a=100x(50-x),x為目標區(qū)域距離攝像機的垂直距離。實驗中最遠可以檢測到距離攝像機50 m的目標。該過程可以將待檢測區(qū)域進一步減少到200個-300個。然后將其投影到2D圖像中,這些待檢測窗口在接下來的步驟中用于對其是否是行人進行判別分類,見圖3。由于引入了上述判斷過程,在接下來的分類過程中計算時間將減少為原來的10%-15%。
3 行人分類
得到在地面上的一系列ROIs后,將對其進行判別分類,以判斷其是否為行人。本文采用類Haar特征和RealAdaBoost學習方法。
3.1類Haar特征
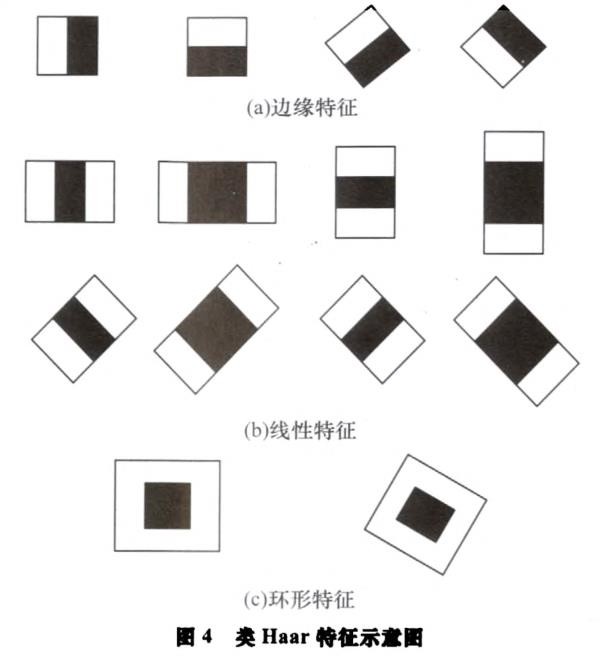
類Haar特征是一種簡單矩形特征,因類似于Haar小波而得名[4]。矩形特征的值是指圖像上2個或多個形狀大小相同的矩形內部所有像素灰度值之和的差值。黑色矩形和白色矩形在圖像子窗口中對應區(qū)域的灰度級總和之差,它反映了圖像局部的灰度變化。文獻[5]在類Haar特征原型的基礎上,通過旋轉變換增加了類Haar特征的數量。
類Haar特征分為3類:邊緣特征,線性特征,環(huán)形特征,組合成特征模板,見圖4。在確定特征形式后類Haar特征的數量取決于訓練樣本圖像的大小,特征模板在子窗口內隨著尺度的不同任意放置,一種形態(tài)稱為一種特征,找出所有子窗口的特征是進行弱分類器訓練的基礎。
3.2 Real AdaBoost機器學習方法
AdaBoost算法是利用大量的分類能力一般的弱分類器通過一定方法疊加起來,構成一個分類能力很強的強分類器。如果一個學習算法通過一組樣本的學習后,能夠達到理想的識別率,則稱它為強分類器;如果一個學習算法的識別率僅好于隨機的猜測,則稱其為弱分類器[6]。通常,針對一個具體的識別問題,很難找到一個理想的強分類器,但是弱分類器一般都會很多。一種簡單的Boosting算法[7]是采用多數表決法(Boost—by-majority)將多個弱分類器組合起來,這種算法將所有的弱分類器都同等看待,但是效果并不好。文獻[8]提出了一種通過權值調整而運作的AdaBoost算法,解決了以前Boosting算法中存在的問題,對于AdaBoost算法,每次只要加入一個識別率略好于隨機猜測的弱分類器,就能提升所得強分類器的識別率。
4 實驗結果與分析
本節(jié)將從視頻序列中抽取一些結果來說明改進后的攝像機角度估計算法的效果。算法實現及測試中使用的計算機平臺CPU主頻為2.33 GHz,內存大小為3.25 GB,在Visual C++6.0環(huán)境下編程實現。圖5所示是路面點的算法選擇過程中被標志為屬于路面上的像素點。圖6是根據直線擬合后得到的路平面方程擬定的2 000個侯選窗口。圖7中根據空間信息進行分析之后,排除大量不可能存在行人的區(qū)域,將窗121數量減少到200個左右,從圖中可以看出,分析結果準確。這大量減少了分類器進行分類的工作量,檢測速度得到了極大提高。


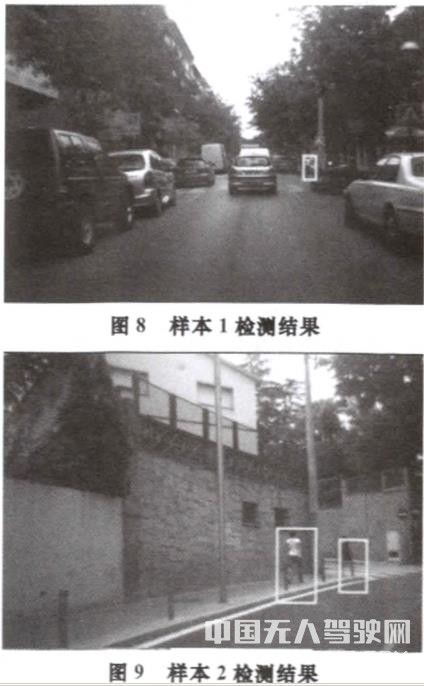
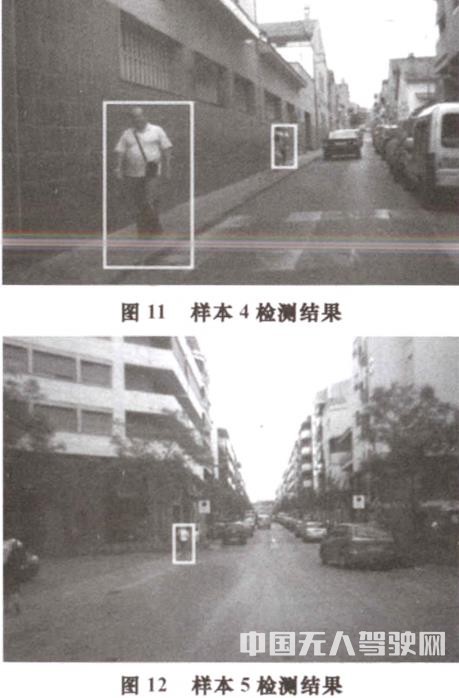
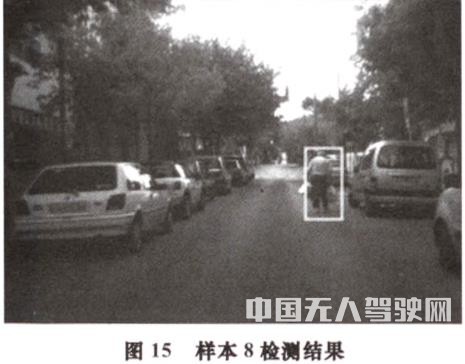
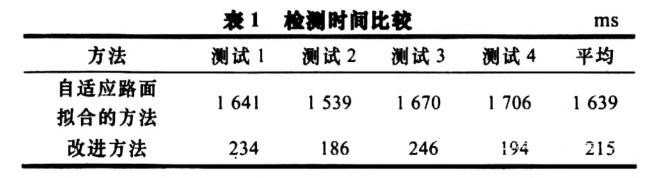
圖8~圖15給出了一些最后的行人檢測結果。表1給出了改進后的方法與文獻[3]中所述自適應路面擬合的方法在對每一幀圖像檢測行人目標過程所需計算時間的比較,可以看出。本文方法在檢測速度上獲得了極大提高。


5 結束語
本文提出車載行人檢測中2個非常重要的改進:
(1)通過直線擬合確定路平面的方程;(2)通過分析候選區(qū)域的空間信息使待檢測窗口大量減少,從而提高檢測速度。基于攝像機角度估計的自適應圖像采集方案同樣適用于智能輔助駕駛系統(tǒng)的其他應用,如交通車輛檢測、路平面分割,從而可以實現對其他目標的快速檢測分類。車載行人檢測還有很多方面需要提高和改進,如其他的特征表達方式及檢測方法。在以后的工作中將研究更有效和更有針對性的特征表達方式。
參考文獻
【1】Sappa A,Geronimo D,Dornaika F.On—board Camera Extrinsic Parameter Estimation[J].Electronics Letters,2006,42(1 3):745-747.
【2】Labayrade R,Aubea D.A Single framework for Vehicle Roll,Pitch,Yaw Estiestimation and Obstacles Detection by Stereovision[C]//Proc.ofthe IEEE Intelligent Vehicles Symposium Columbus,USA:Is.n.】,2003:31-36.
【3】Geronimo D,Sappa A,Lopez A,et a1.Adaptive Image Sampling and Windows Classification for On.board Pedestrian Detection[C]//Proc.of the I 5th Int’I Cone on Computer Vision Systems.Riode Janeiro,Brazil:【s.n.】,2007.
【4】Viola P,Jones M.Rapid Object Detection Using a Boosted Cascade of Simple Features[C]//Proc.of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.【S.I.】: IEEE Press,2001:511-518.
【5】Lienhart R,Maydt J.An Extcnded Set of Haarlike Features for Rapid Object Detection[C]//Proc.Of ICIP’02.【S.1.】:IEEE Press,2002:900.903.
【6】Valiant L G A Theory of the Learnable[J].Communication of the ACM 1984.27(1I):1134-1142.
【7】Schapire R E.The Strength of Weak Learnability[J].Machine Learning,1990,5(2):197-227.
【8】Freund Y.Schapire R E.A Decision-theoretic Generalization of On-line Learning and an Application to Boosting[J].Journal of Computer and System Sciences,1 997.55(I):11 9-139.






















