


而現在,Momenta 集二者之所長,避二者之所短:
Tesla+Waymo,就是 Momenta。

完全無人駕駛發布
12 月 26 日,Momenta 對外正式發布 L4 級無人駕駛技術 MSD ,開始支持城市內完全無人駕駛場景。
如果說 2019 年來 Momenta 發布的前裝量產產品 Mpilot,更像是特斯拉方案。
那么現在,MSD 上馬,則顯出 Waymo 路線雄心。
萬萬沒想到,自動駕駛業內一度紛爭的兩種路線,如今讓 Momenta 實現二合一。
但 MSD 究竟是一套怎樣的方案?
區別于量產前裝方案,Momenta 完全無人駕駛方案中最明顯不同在于多了激光雷達。

在其測試車中,共搭載 12 個攝像頭,5 個毫米波雷達和 1 個激光雷達。整套系統傳感器方案以攝像頭為主,激光雷達為輔,多傳感器冗余。
而且 Momenta 強調,除去激光雷達,方案中的硬件選型與前裝量產保持一致——這也是 Momenta“兩條腿”向前的關鍵考量,后面還會詳細講到。
不過,說一千道一萬,無人駕駛——還得以身試乘看一看。
MSD 方案的試乘,選在了 Momenta,地點毗鄰蘇州高鐵北站,屬城建頻繁區域,路線全程約 12 公里,沿途經過 30 余個紅綠燈路口:
既包括無保護左轉等典型場景,也有非機動車混行、立交橋下長路口等復雜路段。
路線中還有多處工地,也有學校、居民區、寫字樓、商業中心等生活場景。
符合 Momenta 該方案目標所指:城市區間內,完全無人駕駛。
而且路段基礎設施也沒有過 V2X 改造,依然拼的是單車智能實力。
試乘中最基本的場景自然是購物中心附近的行人:

以及在高鐵站停車場附近的無保護左轉:

車流交匯交互,也是最有意思的場景。MSD 方案雖初發布,但智能程度已有老司機風范,在試乘的幾次交互場景中,有讓行、也有選擇先過,并不基于單一規則。
同車試乘的 Momenta 研發總監夏炎解釋,這能體現 MSD 在預測規劃方面的實力和學習能力。
不過整體試乘而言,因為城市區間不同高速場景和停車場,Momenta 的 AI 司機給人的印象是:安全第一,寧慫不偏激。
比如在蘇州相城道路,會出現不規則的異型車——挑戰自動駕駛系統的感知識別。
甚至遭遇違章逆行情況:

其實從當天道路實際情況來看,系統完全可以“偏激”一些,讓路不減速通過。
但安全第一思考下,Momenta 工程師打造的該系統,在交通中不確定性較大的情況下,先減速,甚至剎車,確保交互雙方的安全。
而且相比人類老司機,MSD 雖初生牛犢,但也展現出不凡實力。
遭遇人類司機深為苦惱的大貨車時,既要對大貨車的載貨品類多樣、形態各異準確感知,還要對大貨車行為上的激進行為有應對:
MSD 跟隨慢速行駛的大貨車一段時間后,“決定”變道超車,但在超車過程中仍保持對貨車一定的安全距離,通過接近路口的實白線后才拉大橫向距離超車,保證了超車過程中的安全性。
完全無人駕駛新速度
12 公里左右里程,按道路交規限速行駛,近 40 分鐘,歷經城區內各種場景——有臨時施工、有不規則車輛,還有逆行,但全程無接管。
這樣的完全自動駕駛能力,起步最早的谷歌用了近十年,百度從開始研發到落地也超過 5 年,一眾自動駕駛新勢力從無到有也走過了快 3 年……
雖然深度學習、大數據和大計算帶來的指數加速,已再明顯不過。
但得知 Momenta 的速度,依然讓人不可思議:
50 人左右的團隊,5 個月左右的時間。
沒錯,從今年下半年交貨量產自動駕駛產品后,Momenta 才開始囤積重兵,依靠公司長期的技術和數據積累,以及量產自動駕駛和完全無人駕駛通用的平臺支持,開始攻堅完全無人駕駛。
至于能夠達到城區開放道路全程無接管,之前行業內最快的友商也差不多用時 1 年,且積累了至少十萬公里以上實際路測里程。
所以 Momenta 之速,背后究竟有“引擎”?
Momenta CEO 曹旭東認為,與他們內部看問題的角度、方法和戰略選擇有關。
Momenta 創辦,從一開始就明確目標,要打造自動駕駛大腦。

這并非傳統汽車產業內“換輪子”,而是行業開始 AI 化變革后,供應鏈環節中的新機會。
汽車產業鏈中:
有最基礎的 Tier1 一級供應商,如博世、大陸,在系統層面、硬件層面提供產業支持。
再往上則是 OEM 廠商,奔馳、寶馬、豐田……即車廠。
還有智能化的基礎——計算芯片,如 TI、NXP、瑞薩和英偉達。
最后,核心新增的玩家,一方面是提供出行網絡的滴滴 Uber 等,另一方面則是提供自動駕駛所需核心算法和軟件的技術公司。
比如定位“自動駕駛大腦”的 Momenta,就處于這一層。
但即便如此,如何實現完全自動駕駛,如何最高效擁抱未來,也沒有清晰明確的答案。
至少在打造自動駕駛大腦這件事上,特斯拉方案和 Waymo 路線一度不可調和。
兩個路線的爭論
所謂特斯拉路線,是按照自動駕駛等級的劃分,從低級往高級不斷升維,通過量產汽車對場景、數據和算法的迭代,最終實現完全無人駕駛。
而且正是因為堅定量產路線,也為了最低門檻獲取數據、場景和功能反饋,偏執狂馬斯克完全依靠攝像頭方案、不使用價格昂貴的激光雷達。
所以即便 2019 年發布為完全自動駕駛而生的 FSD 硬件,外界也不相信馬斯克 2020 百萬 RoboTaxi 的豪言。
而 Waymo 路線,則認為只有從一開始 L4 才能實現 RoboTaxi。該路線中,人機共駕的高級輔助駕駛被認為有天然 Bug——既要機器輔助駕駛,又要人類在緊急時刻接管,顯然不靠譜。
于是 Waymo 從 2009 年正式推動后,逐漸明確了實現方式:
原型車、規模化路測、在豐富場景中不斷迭代,區域內落地,終極場景是讓無人車行駛運營在任何時間、任何地點和任何場景。
但 Waymo 路線中,最難的是無窮無盡的“長尾”問題,現實中總會有出乎預料的新場景、特殊挑戰,這就要求自動駕駛系統足夠聰明、且學習迭代得足夠快。
所以概括而言,二者優缺點都很明顯。
特斯拉方案:想依靠低成本傳感器方案不斷升維,難且有道德挑戰;但好處是數據“眾包”,能在量產中獲得現金流和數據流。
Waymo 路線:希望一己之力不斷擴大無人車隊規模,最終真正實現完全落地,險且依賴融資燒錢;而好處是安全性相較而言更可控,不用把車主當小白鼠。
但如今 Momenta 之行動,所謂“兩條腿”戰略,卻實現了特斯拉和 Waymo 路線的二合一。
重新定義了實現無人駕駛的關鍵路徑。

即,通過量產自動駕駛產品獲得海量數據,持續研發數據驅動的核心算法,打造閉環自動化工程體系,發揮數據價值,高效迭代技術,最終實現完全無人駕駛。
同時,MSD 的技術框架中不同傳感器的感知算法相互獨立冗余,并非完全依賴某一種傳感器,因此目前量產傳感器收集的數據,如視覺、地圖、軌跡數據等可以無縫應用并有效助力 MSD 算法提升。
最終,一個數據流和技術流的閉環搭建完成,量產自動駕駛和完全無人駕駛,真正互相補益。
但為何能打通?又為什么是 Momenta?
一切要從 Momenta 創立之初對自動駕駛的認知說起。
終局視角思考無人車
Momenta 2016 年創辦,當時就分析過特斯拉模式和 Waymo 路線。
但并非為結合二者而生。
曹旭東回憶,從一開始就希望從本質出發、從終局角度思考問題。
Momenta 的思考中,自動駕駛的終局,一定是 L4 級以上,不需要方向盤、不需要人類司機。
但要實現這個終局,結合深度學習為核心的 AI 新浪潮,兩大要素就格外關鍵:
一是數據驅動。
二為海量數據。
之所以要數據驅動,是因為完全無人駕駛中的長尾問題——幾乎是難以窮盡的。
唯一的可能性只有數據驅動,自動化解決大部分的問題,例如 99% 問題。

所以 Momenta 內部,“架構師”文化興盛,他們目標是架構能夠自動化解決問題的系統。
在當前系統中,Momenta 的 “閉環自動化”方法論就已發揮作用,通過建立對問題自動化發現、記錄、標注、訓練、驗證的閉環過程,為技術和數據提供自動化的迭代能力。
而關于海量數據,這是數據驅動的原料和前提。
之前有粗略估計,實現完全無人駕駛,需要 100 萬輛車跑一年,每輛每天跑 10 小時以上。
如此海量數據,完全依靠自建車隊采集,幾乎不現實。
量產自動駕駛數據流能夠助力完全無人駕駛,源自統一量產傳感器方案。
MSD 傳感器方案包括視覺傳感器、激光雷達與毫米波雷達,均覆蓋 360°范圍,該傳感器方案子集與量產傳感器方案保持一致。

所以理解了無人駕駛終局的兩大要素,或許也就不難明白 Momenta 此次談及的兩條腿戰略:
一條腿是量產自動駕駛;
另外一條是完全無人駕駛。
量產自動駕駛,人車共駕,以人為主,但解放人類在高速環路、停車場等場景下的駕駛時間,提升駕駛安全性及駕駛體驗。
而且通過量產自動駕駛,實現海量數據獲取——學特斯拉又超乎其外。
進一步,量產自動駕駛可以給完全無人駕駛帶來數據,通過數據驅動的方式,去自動化地解決 99% 的問題。
未來隨著量產產品上市,像 “活水”一般源源不斷注入 MSD,推動 MSD 算法不斷升級,使得完全無人駕駛系統不斷進化。
這是數據流上的打通。

而通過完全無人駕駛,還能給量產自動駕駛反饋技術流,不斷提升體驗和能力,讓量產自動駕駛持續進步,提升行業份額。
當然,數據流和技術流形成閉環,聽起來不算稀奇。
但真正實現這樣的戰略并不容易,關鍵是量產傳感器方案的一致性、互補性,并在量產自動駕駛戰略中真正快速低成本交貨、落地。
這也是特斯拉和 Waymo 難以跨公司二合一的原因。
另外,作為創業公司,在數據流和技術流閉環之外,靠融資燒錢顯然不可持續,必然還需要現金流。
所以 Momenta 創辦 3 年來,先在量產自動駕駛發力,實現數據流和現金流方面的驗證,然后發力完全無人駕駛,同時著力于打通兩者之間的數據流和技術流。
現在,完全無人駕駛方案發布,數據流和技術流的戰略雛形形成,現金流也能讓公司不受輿論和資本市場變化而左右。
曹旭東說, 目前 Mpilot 和 MSD 的原型發布,標志著兩條腿的雛形期形成。預計到 2019 年-2024 年,量產自動駕駛大規模上市,以及 MSD 真正的完全數據驅動,完全自動化,則是“兩條腿”戰略得到驗證的時刻,也是戰略的成型期。
道阻且長,行則將至
不過,也還沒到一腳定江山的時刻。
雛形初現,一切還只不過是開始。
更何況這樣的戰略完整披露,一方面會面臨質疑,另一方面也有被復制的風險。

按照 Momenta 的說法,執行層面主要面臨兩個維度的挑戰:包括技術難度和商業難度。
技術層面的難,例如數據流的打通。曹旭東認為,行業主流都是以激光雷達為主的技術解決方案,但 Momenta 是以統一量產傳感器為主,需要打通量產自動駕駛到完全無人駕駛的數據流,而他們在其中做了大量的技術創新。
在硅谷拜訪時,曹旭東也講到 Momenta 的戰略和已解決的技術難題,得到很多行業專家的認可和欣賞,因為 Momenta 在做原始的技術創新,而不是簡單的復制跟隨。
商業層面的難,包括如何深入行業、理解客戶,如何拓展能力邊界及更好的服務市場。
曹旭東進一步解釋:“To B 是系統性的業務,面對的是一個組織,需要得到方方面面的認可。一線客戶都有很強的技術能力和很高的技術標準,需要經過非常嚴格的技術評測。而我們經過層層驗證,最后獲得了客戶的認可,進入了量產體系。”
Momenta 也有相對長遠的完整時間表。
他們內部,認定 2016 年-2019 年是戰略雛形期,2019 年-2024 年是戰略成型期。
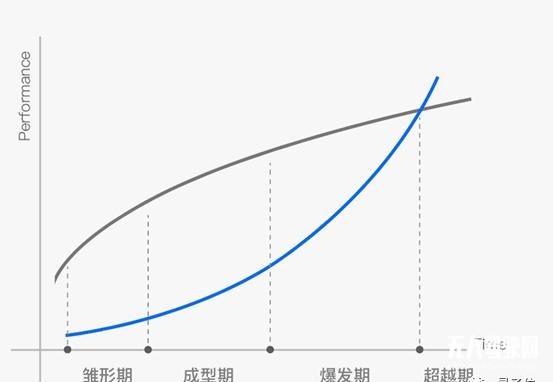
然后 2024 年-2028 年才是真正的戰略爆發期,那時候在完全自動駕駛“這條腿”上將加速趕上 Waymo。
只是現在開始,自動駕駛“面壁者”Momenta,戰略意圖一覽無余。

告別盲人摸象
作用力也才剛剛開始。
從 Momenta 自身來說,徹底告別被“盲人摸象”狀態。
高精度地圖供應商?高級輔助駕駛玩家?量產自動駕駛交貨……
都不準確。
大道至簡,Momenta是一家怎樣的公司?
Momenta = Tesla + Waymo。
而且這種結合帶來的新場景新技能,還可能不是線性相加。
或許也是聚變反應。
比如特斯拉一直是從車角度提供方案,Waymo 則是運力技術維度……
但二者結合,就是完整軟硬件集合體,載人載貨,私家車共享車,都有了可能。
簡而言之,能做的更多,可以做的更多,新價值已經展現,新邊界也就要重勘。
自然還會進一步帶動行業新格局重塑。
自動駕駛發展中,特斯拉方案和 Waymo 路線,一次次被提起,一次次被模仿,一次次被對標。
這樣的新玩家新勢力,無論中美,都可以舉出很多。
但今日之 Momenta,在理論上真正達到二合一,并且驗證了可行性。
于是,之前衡量自動駕駛的時間表,曾經理解 Momenta 的框架,可能是時候刷新了。
One more thing
雖然 Momenta 是中國自動駕駛的獨角獸,但作為 Momenta 的船長,曹旭東最關心的并不是公司的估值。
他認為商業世界一切有為法,一定離不開價值規律本身,估值并不需要過分關心。
他關心什么?
作為 CEO,他說核心還是人,組織的學習、進步和提升。

這位 Momenta 創始人,今年來自上而下改變了一件小事:不再把“創始人”放在對內對外的任何地方,僅以職務——CEO 示人。
他解釋說,Momenta 正在最大限度通過組織變革、文化塑造,形成合伙人文化。
合伙人不分加入先后,不論年齡資歷,核心關注的是技術、貢獻和志同道合。
他希望以此吸引最頂級的牛人,讓更多有識之士加速自動駕駛終局到來。
《道德經》里說,夫唯不爭,故天下莫能與之爭。
但真正能邁步實踐者,少之又少。
如今,無人車獨角獸 Momenta,宣示兩條腿,放下“自我”,立志要做推動終局實現的那個玩家。
這就是 Momenta。






















