


想象一下:汽車在高速公路上行駛,遇到了另一輛橫穿多條車道的汽車。如果要防止碰撞,就必須減速,但是如何控制減速的速率呢?Lyft的自動駕駛原型利用“受人類啟發(human-inspired)”的規劃方法,以確定減速速率。最初,該公司使用的基準AI模型不考慮障礙物速度,而最新的模型學習人類駕駛,面對高速超車的汽車時會逐漸減速。
Lyft Level 5團隊表示,“此種混合方式能根據人類的偏好進行調整,使駕駛體驗更舒適、更自然。我們相信,將基于規則的系統、基于學習的系統,以及人類駕駛數據相結合,可以產生全面的系統級解決方案。”
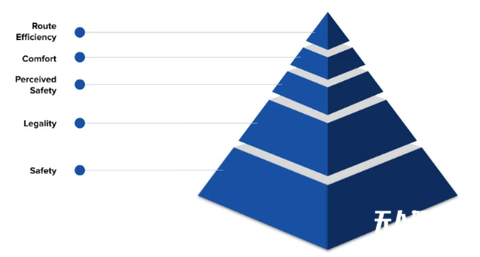
L5工程師們表示,他們從馬斯洛的需求層次理論和阿西莫夫的機器人學三定律中獲得靈感,進行自動駕駛汽車決策系統架構設計。該金字塔模型的基礎是安全性和合法性,即在執行操作之前,Lyft車輛會驗證其規劃行為是否安全,是否符合當地法律。
此外,該規劃模型還考慮了感知安全概念,即使在實際安全風險較低時,也會盡量減少乘客和其他駕駛員的不安全感。在實際駕駛中,可能需要拉大與前車的距離,或者確保自動駕駛汽車不會離車道分隔帶過近。該模型的倒數第二層是舒適度,例如減少由于重力導致的惡心。該模型的最頂端是路線效率,例如盡快抵達目的地。
自動駕駛汽車系統透明化將是提高公眾接受度的關鍵。根據去年因特爾委托PSB Research進行的一項調查,盡管約94%的車禍是由人為失誤造成的,但是仍然只有21%的美國人愿意將他們的汽車換成自動駕駛汽車,近一半(43%)的人在自動駕駛汽車附近感到不安全。
Lyft自動駕駛發展歷程
Lyft Level 5團隊由一群數據科學家、應用研究人員、產品經理、運營經理和其他人員組成,致力于為拼車服務構建自動駕駛系統。自2017年7月成立以來,該部門開發了新的3D分割框架、評估車輛能效的新方法,以及使用眾包地圖追蹤車輛移動的技術。
今年早些時候,Lyft在加州帕洛阿爾托(Palo Alto)Level 5總部附近,開設了新的道路測試站點。工程師們將在該中心模擬真實駕駛場景,包括十字路口、紅綠燈、道路合并、行人通道和其他公共道路條件,而且其中的組件將可重置。
一年前,Lyft在帕洛阿爾托擴大其員工自動駕駛服務范圍,配備人類安全駕駛員的自動駕駛車輛在限定區域內行駛。今年該公司表示,可行駛路線增加了三倍,并計劃迅速擴大該項服務的覆蓋區域。
11月,Lyft透露,與半年前相比,其每季度的行駛里程增加了4倍,而且致力于自動駕駛汽車技術開發的員工人數由300名增長到400名。據該公司稱,通過Lyft應用嘗試使用自動駕駛汽車的人中,96%表示希望再次使用。
今年5月,Lyft與Waymo合作,鳳凰城的用戶可以通過Lyft應用叫到Waymo的自動駕駛汽車。此外,Lyft也在與安波福合作,安波福為Lyft拉斯維加斯的客戶提供一小批自動駕駛汽車。最近,Lyft還將其自動駕駛汽車數據集nuScenes全部開源,具有超過55000個人工標注的3D注釋交通主體框架。






















