


0 引 言
隨著城市化進程的加速,交通問題已經成為大多數城市所面臨的難題之一。無人駕駛車輛的研究可以極大地改變這一現狀,因此在近年中得到各國的重視。智能車是集自動控制、機械設計、機器視覺、傳感器、信息融合、人工智能等多種理論和技術于一體的交叉學科,對智能車領域的研究不僅對現代交通系統的發展著重要意義,在軍事和工業方面也具有廣闊的應用前景。
而對于道路可通行區域的檢測是保障無人駕駛車輛安全行駛的最低保障。對于道路的檢測,激光雷達具有很高的分辨率和精度、寬的掃描范圍和相較于雷達低的成本,且在惡劣天氣下的效果也在不斷改善和提高[1,2]。因此,本文中使用激光雷達來進行道路可通行區域檢測。使用激光雷達的道路檢測方法可以根據提取出的道路特征進行分類:一類是障礙物檢測方法,激光雷達朝車輛前方掃描,以提取出車輛、路標和護軌等[3,4];另一類方法是提取道路、道路標志(如車道線、路緣石等),這種情況下的激光雷達是朝車輛前方掃描,并帶有一定的俯角[5,6]。
1 系統設計概述
1.1激光雷達安裝
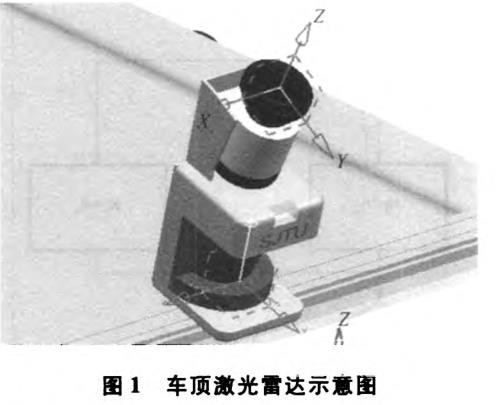
本設計中共使用3個激光雷達。其中2個斜向安裝于車頂,用于檢測道路邊界;1個水平安裝于車輛前方,用于檢測障礙物。
激光雷達使用SICK公司的LMS291和LMS151。使用的角度分辨率均為0.5度,檢測角度范圍也都設為1800。車頂激光雷達如圖1所示。
1.2坐標系
車輛與各傳感器坐標示意圖2。
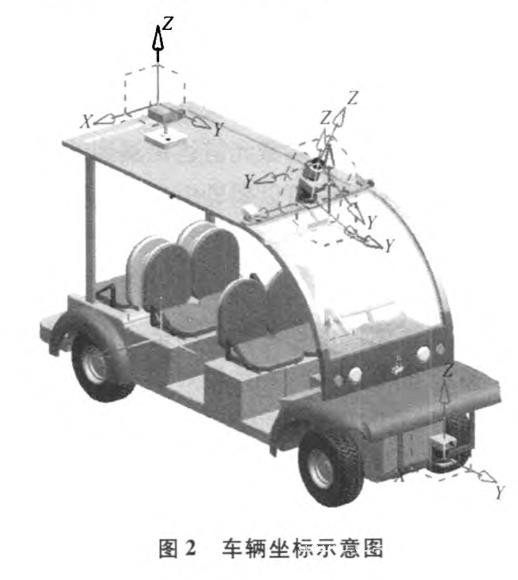
車輛坐標系的原點選擇在車輛后輪軸的中點,X方向沿著車輛后輪軸向右,y方向沿著車輛軸線向前,z方向垂直于地面。各激光雷達坐標系坐標最后都投影到車輛坐標系下。2D的激光雷達提供的距離數據是在極坐標系下的,每一幀的距離數據可以看作是一個點集:
2 道路檢測
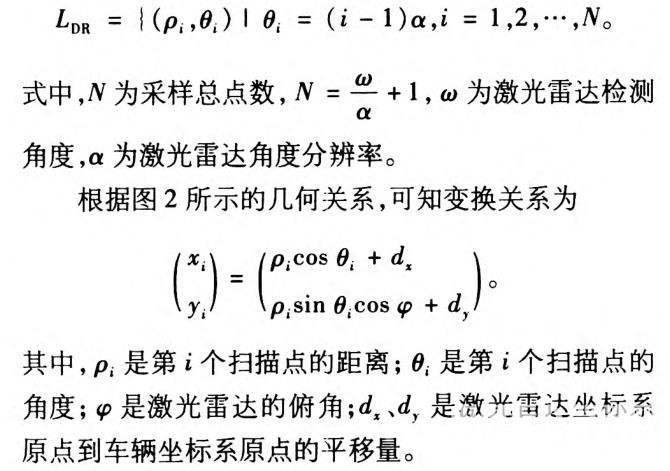
目前使用激光雷達的道路檢測方法都是使用直線擬合。而在實際道路中,為了排水等因素,道路往往是中間高、兩邊低的弧形,而在一些較窄的道路上弧形尤為明顯。在這樣的情況下,使用直線擬合的道路檢測方法顯然并不能達到很好的檢測效果。下面以我校電信群樓前道路為例,激光雷達掃描投影結果如圖3。
圖中,水平直線是假設道路為水平面時激光雷達應有的位置,可以很明顯地看出道路本身不是一個水平面。直線擬合方法若是應用于此會得到很多段不同的線段,雖然可以通過加入某些先驗約束來連接這些直線構成道路[7],但是依靠過多的先驗假設會降低整個系統的魯棒性;因此,本文將道路看作是一個曲面,轉而使用二次函數擬合來求出道路曲面邊界。從點集尺。中取出一個子序列,轉換到直角坐標系后記為
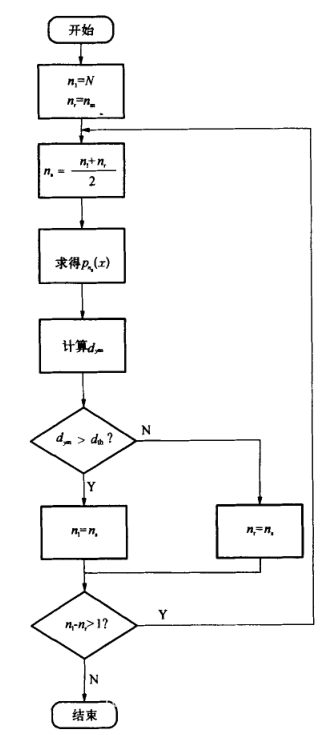
分別求出近端激光雷達檢測到的道路邊界點(xn1,yn1),(xnr,ynr)與遠端激光雷達檢測到的道路邊界點(xf1,yf1),(xfr,yfr)后,可以勾勒出道路邊界位置。
3 障礙物檢測
3.1聚類
使用激光雷達進行障礙物檢測是一種較為普遍的做法,很多研究機構和單位都對其進行了不少研究[6,8],本文采用的只是簡單的聚類方法,即對坐標變換后的數據進行聚類,把障礙物分離出來。聚類依據首先是物理約束,即認為同一物體在激光雷達相鄰兩個檢測點的差別不會超過一個閾值d1h即滿足條件

則認為是同一物體。
3.2膨脹障礙物區域
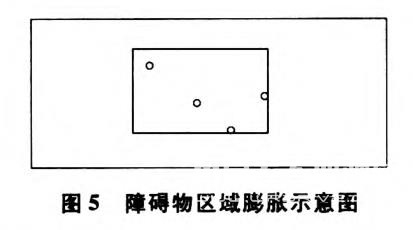
在獲得障礙物的聚類結果后,由于車輛本身不是質點而是有寬度的,需要對每個障礙物進行膨脹,以防止出現誤判,引起擦碰等事故。
本設計中使用的膨脹模型為矩形,即在最小可以包裹障礙矩形的基礎上進行膨脹。考慮到安全性,x向膨脹為1.5 m(大于車寬的一半),Y向膨脹為0.5 m。見圖5。
3.3無障礙區域檢測
由車輛最小轉向半徑Rm可以得到車輛航向偏角極值
式中,L為車輛軸距。
在給定的安全距離dsafe如下,對區間為(-θm,θm)、半徑為dsafe的扇形區域進行障礙物檢測,排除所有有障礙物的區間,剩下1個可通行區域集合。
4 可通行區域融合
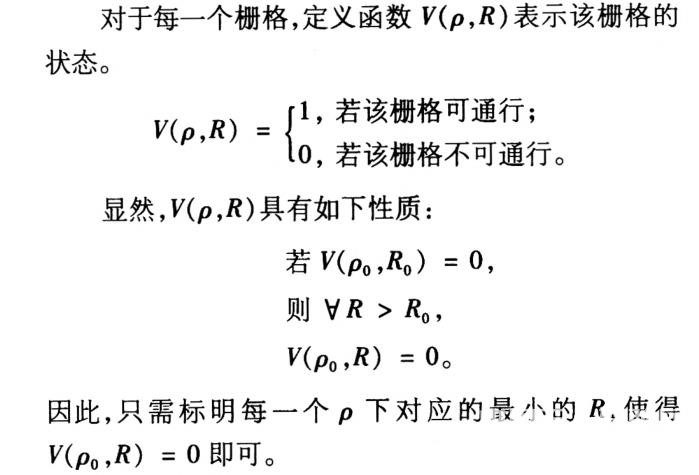
4.1可通行區域表示方法
對于道路可通行區域的表示方法,現在采用較多的是使用如圖6所示的二維柵格來表示。
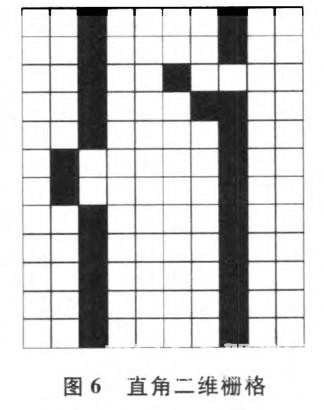
該方法與特征地圖、拓撲地圖以及直接表征法都是機器人學中常用的地圖表示方法,用于建立地圖的有效性無可厚非;但是用于實時表示車輛前方的可通行區域卻不是最合適。根據車輛的機械結構我們可以知道,車輛的運動并不是由相互獨立的橫向運動與縱向運動構成的,而是由圓弧運動構成的,因此使用直角坐標系下的柵格地圖并不是最合適的。
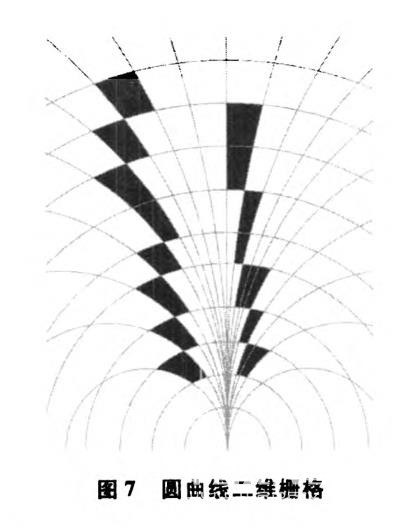
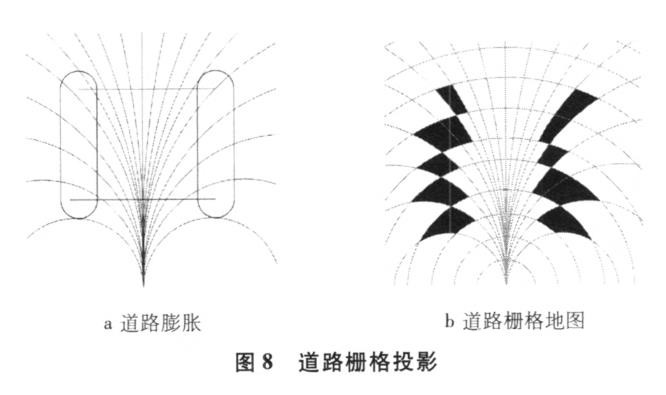
針對車輛運動軌跡特性,本文提出了一種基于圓曲線簇的變形柵格表示方法。柵格坐標(p,R)中,P表示點所在圓曲線半徑,該圓曲線簇全部都是通過原點且以車輛正前方向為切線的圓曲線;尺表示點距離原點距離。該柵格示意圖如圖7所示。使用該柵格可以方便地得到任意距離下可行的轉向半徑。
4.2數據融合
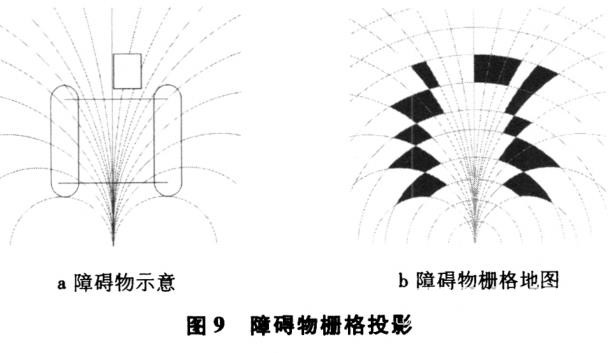
首先在柵格地圖內勾勒出道路邊界,使用上文中提到的方法可以由2個斜向激光雷達分別得到不同距離下的4個道路邊界點:遠端左邊界(xf1,yf1)、遠端右邊界(xfr,yfr),近端左邊界(xn1,yn1)、近端右邊界(xnr,ynr)。連接左邊界和右邊界可以得到2條線段分別代表檢測到的道路邊界線。對該線段進行一定膨脹以保證安全性,再將該區域內的柵格點標記為1。道路膨脹如圖8a所示,對應柵格地圖如圖8b所示。然后將前文中由水平激光雷達數據計算得到的障礙物加入柵格中,障礙物位置如圖9a所示,加入后的柵格如圖9b所示
5 實驗結果
5.1道路邊緣檢測
(1)校內實驗 圖10a為普通道路檢測結果,圖10b為兩側有灌木叢道路的檢測結果。
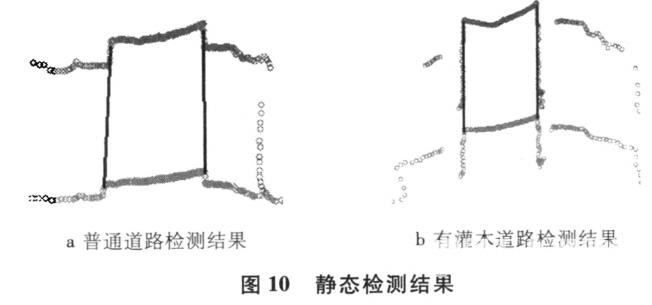
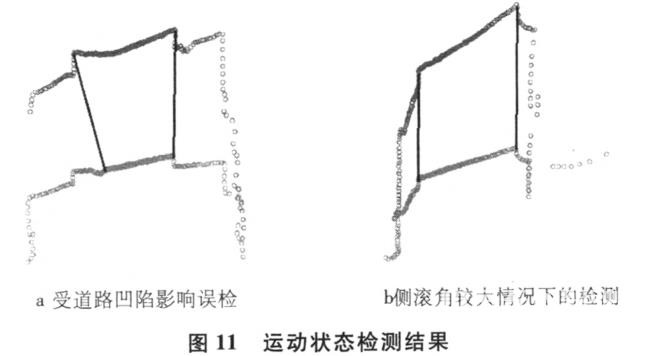
圖11a為受到道路凹陷影響時的誤檢測,圖11b為快速通過曲線道路,車輛側滾角較大時的情況。
僅一側有道路邊界的情況見圖12。

校內實驗結果見表1。
(2)城市道路實驗 城市道路邊界檢測結果見圖13。
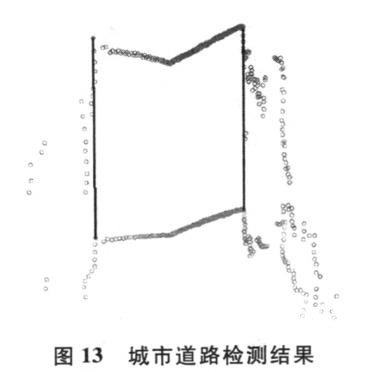
測試道路較為寬闊,因此左側道路邊緣相對點數較少;但是由圖中可以看出,使用本文方法仍能夠較好地檢測出道路邊界點。
實驗路線如圖14所示。
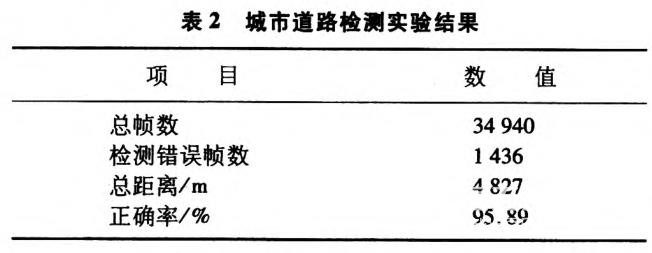
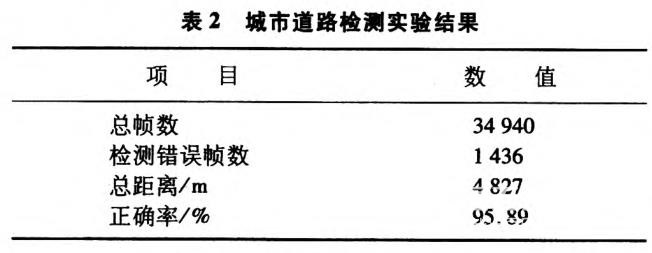
城市道路檢測實驗結果見表2。
5.2可通行區域合成實驗
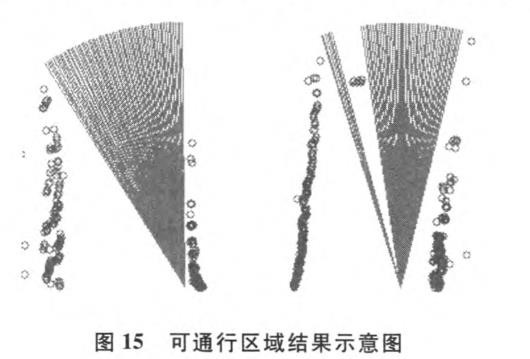
本實驗中設定安全距離為30 m,則可通行區域可用一點集AR表示,

圖15給出了一組可通行區域檢測結果的示意圖。圖中的每一條直線的終點都表示一個可通行方向。
6 結束語
本文提出了一種使用3個激光雷達的道路可通行區域檢測方法,在道路邊界檢測中使用了二次函數代替原先的線性擬合方法,達到了更好的檢測效果。目前數據的融合還較為粗糙,只是簡單地疊加;后期可以將水平激光雷達數據與斜向激光雷達數據進一步融合,剔除斜向激光雷達數據中被障礙物遮擋的部分,使得道路邊界檢測魯棒性更強。
參考文獻:
[1] 王在濤.我國大中城市交通現狀分析[J].物流科技,2010(7):140—141.
[2] LAURENT BOURAOUI,STEPHEN PETYI,ANIS LAOUITI,eta1.Cybercar Cooperation for Safe Intersections[c].ITSC’2006 IEEE Intelligent Transportation Systems Conference.Toronto,2006.
[3] KIRCHNER T Heinrich. Model.based detection of road boundaries with a laser scanner[C]. International Conference on Intelligent Vehicles,1998.
[4] WEISS T,SCHIELE B,DIETMAYER K.Robust driving path detection in urban and highway scenariosusing a laser scanner and online occupancy—ds[C].IEEE Intelligent
[5] Vehicles Symposium Istanbul,2007.HEIKO CRAMER,GERD WANIELIK. Road border detection and tracking in non-cooperative areas with a laser radar system[C].German Radar Symposium Bonn,2002.
[6] 趙一兵,王榮本,李琳輝,等.基于激光雷達的無人駕駛車前方障礙物檢測[J].交通與計算機,2007(2):5—8.
[7] 趙汗青,韓寶亮,王珂珂.基于擺動式單線激光雷達的障礙物檢測算法[J].裝甲兵工程學院學報,2010(4):5—8.
[8] 蔡自興,肖正,于金霞.基于激光雷達的動態障礙物實時監測[J].控制工程,2008,15(2):200—203.






















