


CMU(Carnegie Mellon University,卡耐基梅隆大學(xué))擁有世界頂尖的計(jì)算機(jī)科學(xué)學(xué)院,而不為人所知的是,CMU也是當(dāng)代自動(dòng)駕駛技術(shù)的發(fā)源地——1984年CMU校內(nèi)第一代Terregator的誕生,奠定了自動(dòng)駕駛“自主識(shí)別和駕駛”的baseline,也開啟了CMU在此基礎(chǔ)上長(zhǎng)達(dá)30余年的自動(dòng)駕駛研究征程。在自動(dòng)駕駛的影響力名錄上,CMU系學(xué)生和校友也占據(jù)著絕對(duì)份額:被譽(yù)為“自動(dòng)駕駛之父”的Sebastian Thrun曾是CMU機(jī)器人學(xué)習(xí)實(shí)驗(yàn)室的助理教授和主任;通用汽車視覺系統(tǒng)的BFO(BOM Family Owner)張文德曾是CMU 無(wú)人車團(tuán)隊(duì)的主力成員之一;而放眼創(chuàng)業(yè)公司,CMU也是當(dāng)代自動(dòng)駕駛技術(shù)的發(fā)源地“幾乎所有的自動(dòng)駕駛汽車項(xiàng)目都與Pomerleau教授以及CMU的Nav lab有千絲萬(wàn)縷的聯(lián)系”。

記者獨(dú)家對(duì)話CMU Argo Lab人工智能無(wú)人駕駛研究中心首席科學(xué)家John Dolan,從學(xué)者角度分析自動(dòng)駕駛的技術(shù)難點(diǎn)和研究現(xiàn)狀,介紹自動(dòng)駕駛的學(xué)界研究情況。
專訪內(nèi)容整理如下:
自動(dòng)駕駛:“20年實(shí)現(xiàn)自動(dòng)駕駛”的輝煌圖景
按照國(guó)際通用標(biāo)準(zhǔn),根據(jù)智能化程度的不同,自動(dòng)駕駛汽車可以被分為5個(gè)等級(jí):L1-輔助駕駛、L2-部分自動(dòng)駕駛、L3-有條件自動(dòng)駕駛、L4-高度自動(dòng)駕駛、L5-完全自動(dòng)駕駛(無(wú)人駕駛)。通常所說的“自動(dòng)駕駛”,一般指L3及以上的高等級(jí)自動(dòng)駕駛汽車。
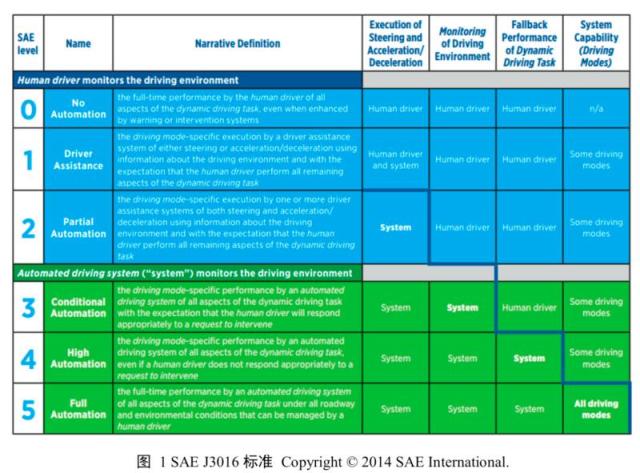
從全球范圍來(lái)看,L1/L2級(jí)別的自動(dòng)駕駛汽車已經(jīng)實(shí)現(xiàn)了大規(guī)模量產(chǎn)。而踩在“自動(dòng)駕駛”實(shí)現(xiàn)邊緣的L4級(jí)別自動(dòng)駕駛汽車目前卻仍處于測(cè)試,或“在限定區(qū)域、限定人群”的小范圍應(yīng)用階段。
“很多公司在過去幾年中一直在向外發(fā)聲:‘我們距離自動(dòng)駕駛很近了 (we are really close to auto-driving)’或者‘我們將在未來(lái)20年內(nèi)實(shí)現(xiàn)自動(dòng)駕駛’,然而事實(shí)并非如此。”在John Dolan看來(lái),真正意義上L5級(jí)別的“自動(dòng)駕駛”,仍然非常遙遠(yuǎn)。
問題來(lái)自兩方面:底層技術(shù)和真實(shí)應(yīng)用場(chǎng)景。
技術(shù)攻堅(jiān):“最后5%”的長(zhǎng)尾問題
“學(xué)界的共識(shí)是,我們已經(jīng)在高速公路的場(chǎng)景中很接近“自動(dòng)駕駛”,但我們距離在城市中實(shí)現(xiàn)自動(dòng)駕駛還很遠(yuǎn)(we are pretty far from having cars in cities)。”
在自動(dòng)駕駛的討論中,當(dāng)前的自動(dòng)駕駛在駕駛體驗(yàn)中體現(xiàn)為:人們不再需要注意路障。然而這個(gè)簡(jiǎn)單的需求,實(shí)際上需要一個(gè)整合的系統(tǒng)去滿足,而想要使用一個(gè)完整的計(jì)算機(jī)系統(tǒng)去處理所有實(shí)際場(chǎng)景中可能出現(xiàn)的問題,難度極大。
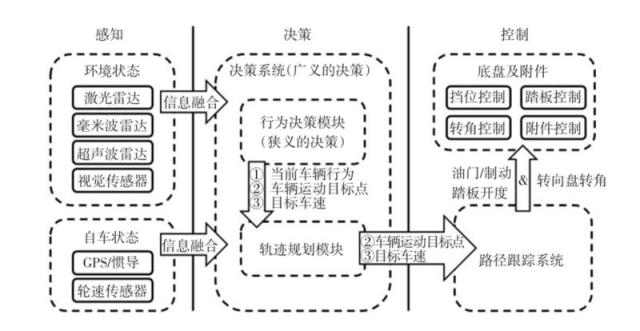
在John Dolan教授看來(lái),2006-2007年,學(xué)界劃定的關(guān)于自動(dòng)駕駛的研究已經(jīng)形成了相對(duì)完整的架構(gòu),學(xué)界和產(chǎn)業(yè)界的理論架構(gòu)是:
高層:環(huán)境感知(mission planning)
中層:行為決策(behavior planning)
底層:運(yùn)動(dòng)控制(motion planning)
John Dolan教授指出:
完成這些不同層次的要求需要不同的技術(shù)和算法,并要求整體的技術(shù)架構(gòu)要在規(guī)模部署下完成系統(tǒng)功能,實(shí)現(xiàn)類似人類駕駛的行為。已漸完善的現(xiàn)有技術(shù)的發(fā)展確實(shí)拉高了技術(shù)的基礎(chǔ)線:如GPS提高了定位和路徑規(guī)劃的精準(zhǔn)度;深度學(xué)習(xí),特別是計(jì)算機(jī)視覺的發(fā)展為自動(dòng)駕駛提供了更強(qiáng)的支撐。物質(zhì)(material)的天花板正由制造業(yè)和車企一同打破,但自動(dòng)駕駛作為一個(gè)整合的系統(tǒng),還需要行業(yè)內(nèi)整體系統(tǒng)硬件的效率、算力和計(jì)算速度的發(fā)展。
自動(dòng)駕駛作為與人緊密相關(guān)的日常活動(dòng),其整體的技術(shù)實(shí)現(xiàn)要求的不僅僅是算法和軟件的高效運(yùn)行,還有交互系統(tǒng)的準(zhǔn)確運(yùn)轉(zhuǎn)。在技術(shù)架構(gòu)的中層,決策系統(tǒng)已經(jīng)從狹義的車輛行為決策,到要求行車“不僅能根據(jù)感知層輸出的信息合理決策出當(dāng)前車輛的行為,還要了解和預(yù)測(cè)汽車行駛中的外界環(huán)境,預(yù)測(cè)突發(fā)事件”。人類行為,作為所有模型中的factor X,正在成為自動(dòng)駕駛中最難攻克的艱深課題。
在自動(dòng)駕駛中,底層架構(gòu)和大部分的技術(shù)問題已經(jīng)被解決,而剩下的5%的并未解決的問題,逐漸成為制約自動(dòng)駕駛發(fā)展的決勝手。“最后5%”的長(zhǎng)尾問題遍布于零碎的場(chǎng)景、特殊極端情況和永遠(yuǎn)無(wú)法預(yù)測(cè)的人類行為,在算法、傳感器、計(jì)算平臺(tái)和法規(guī)的不同層面,困擾著學(xué)界和業(yè)界。
真實(shí)應(yīng)用場(chǎng)景:毫無(wú)價(jià)值的100%
為了更好的實(shí)現(xiàn)最后5%的跨越,許多公司選擇增加真實(shí)實(shí)驗(yàn)。
然而在John Dolan看來(lái),實(shí)驗(yàn)室實(shí)驗(yàn)和真實(shí)應(yīng)用場(chǎng)景的認(rèn)知差異是巨大的:實(shí)驗(yàn)室數(shù)據(jù)和模型的精準(zhǔn)度和可信度,在現(xiàn)實(shí)環(huán)境中可能毫無(wú)價(jià)值:實(shí)驗(yàn)室環(huán)境的模擬(simulation)只能使得實(shí)驗(yàn)環(huán)境盡量模擬真實(shí)環(huán)境,卻始終滿足真實(shí)(wild)場(chǎng)景的實(shí)驗(yàn)環(huán)境設(shè)定;實(shí)驗(yàn)室場(chǎng)景的算法和系統(tǒng)準(zhǔn)確度具有批判性(critical):科學(xué)家們必須不斷優(yōu)化部署,使得算法的可靠性不斷提高,而真實(shí)情況往往是:即使是滿足了100%準(zhǔn)確率的實(shí)驗(yàn),在現(xiàn)實(shí)生活中也不一定可行。
除了實(shí)驗(yàn)室與真實(shí)場(chǎng)景的差異,真實(shí)場(chǎng)景下也存在差異。“即使在某個(gè)城市進(jìn)行了自動(dòng)駕駛的成功試驗(yàn),也并不意味著我們可以在另一個(gè)城市復(fù)制成功經(jīng)驗(yàn)。不同的社會(huì)、城市、駕駛環(huán)境和駕駛風(fēng)格(driving style)都會(huì)影響自動(dòng)駕駛的運(yùn)行情況。這也是為什么大多數(shù)企業(yè)始終在堅(jiān)持在不同場(chǎng)景、不同城市下的進(jìn)行真實(shí)實(shí)驗(yàn)的原因。”
“只有在算法不精準(zhǔn)模擬的“最后5%的特殊情況”解決之后,我們才能判定:我們實(shí)現(xiàn)了L5級(jí)別的自動(dòng)駕駛”。John Dolan介紹道。
可靠性:自動(dòng)駕駛領(lǐng)域的核心問題
在自動(dòng)駕駛領(lǐng)域,安全性和可靠性始終是核心問題。
在Uber無(wú)人車事故的一年后的今年,NTSB發(fā)布的一份新報(bào)告顯示:Uber自動(dòng)駕駛測(cè)試車的硬件并沒有出現(xiàn)問題,設(shè)計(jì)存在缺陷的軟件導(dǎo)致了這起致死事故的發(fā)生。Uber的無(wú)人車事故警示了一眾無(wú)人駕駛公司:安全性問題需要在L5來(lái)臨之前得以解決。
目前,在當(dāng)前自動(dòng)駕駛主要依靠的是學(xué)習(xí)機(jī)制。機(jī)器學(xué)習(xí)將作為其中的重要支撐,對(duì)于現(xiàn)實(shí)情況進(jìn)行分析,但這部分的研究也才剛剛開始。
當(dāng)前的理論引入還包括:
形式化驗(yàn)證(formal vertification),即用數(shù)學(xué)工具進(jìn)行定義、開發(fā)和驗(yàn)證(specification, development and verification)。然而自動(dòng)行駛的實(shí)際情況往往遠(yuǎn)高于
臨時(shí)消息檢驗(yàn)(adhoc message),即通過及時(shí)采取的信息進(jìn)行計(jì)算,并列入預(yù)測(cè)機(jī)制。
安全性和可靠性的推動(dòng)為何如此急切?
因?yàn)樽詣?dòng)駕駛的發(fā)展正在引起大眾的注意,吸引著來(lái)自外界的壓力。
政府是最重要的外部力量。高效的可信賴度(high-enough reliability)的問題正在被各地的政府強(qiáng)調(diào),而政府部門控制著真實(shí)場(chǎng)景的試驗(yàn)權(quán)利。
社會(huì)中的道德和心理問題也不容忽視。“全世界每年有124萬(wàn)人死于交通事故,其中91%的死亡交通事故發(fā)生在低收入和中等收入國(guó)家。自動(dòng)駕駛或許并不會(huì)改變交通事故的傷亡人數(shù),但對(duì)于自動(dòng)駕駛應(yīng)用后不變的傷亡結(jié)果,人們的心理卻大不相同。”John Dolan介紹道,“人們希望機(jī)器能比人犯更少的錯(cuò)誤,雖然這類期望(Expectation)并不對(duì)。”
而在長(zhǎng)途卡車運(yùn)輸已經(jīng)成為自動(dòng)駕駛的最佳舞臺(tái)的當(dāng)下,自動(dòng)駕駛的安全性和可靠性也與運(yùn)輸成本、運(yùn)輸有效性掛勾 :理想化的狀態(tài)是,自動(dòng)駕駛的卡車能提高遠(yuǎn)程運(yùn)輸?shù)挠行裕⒇浳锇踩椭聊康牡兀皇且驗(yàn)槭鹿试斐纱笞谪浳飺p失。
這就涉及到強(qiáng)調(diào)自動(dòng)駕駛可靠性和安全性的另一個(gè)維度:經(jīng)濟(jì)效應(yīng)。自動(dòng)駕駛的影響是雙向的:當(dāng)自動(dòng)駕駛深入街道,司機(jī)的生存和就業(yè)空間會(huì)受到影響;另一方面,自動(dòng)駕駛的服務(wù)仍然是高價(jià)的,并非所有人都能支付該服務(wù),自動(dòng)駕駛的不穩(wěn)定性也會(huì)影響乘客的支付意愿——乘客會(huì)思考:一個(gè)并不穩(wěn)定或你安全的自動(dòng)駕駛服務(wù),是否值得我購(gòu)買?
競(jìng)爭(zhēng):領(lǐng)先地位與后發(fā)優(yōu)勢(shì)
在自動(dòng)駕駛方面,學(xué)界的重要性是不言自明的:學(xué)界為產(chǎn)業(yè)界輸送的不僅僅是技術(shù)研究,更多的是優(yōu)質(zhì)的人力資源。
作為“自動(dòng)駕駛的黃埔軍校”,CMU的自動(dòng)駕駛合作伙伴名單上既有Uber、Argo此類自動(dòng)駕駛科技公司,也包括通用等大型車企。來(lái)自CMU的畢業(yè)生創(chuàng)業(yè)公司更占據(jù)了自動(dòng)駕駛創(chuàng)業(yè)公司的半壁江山——John Dolan教授曾在2007 DARPA城市挑戰(zhàn)賽(DARPA Urban Challenge)中帶領(lǐng)CMU無(wú)人車團(tuán)隊(duì)(Carnegie Mellon's Tartan Racing Team),而僅該競(jìng)賽隊(duì)里,就走出了多家自動(dòng)駕駛獨(dú)角獸或新銳公司:包括Argo AI創(chuàng)始人Bryan Salesky、Aurora創(chuàng)始人Chris Urmson、Cruise的創(chuàng)始人Kyle Vogt和Zoox創(chuàng)始人Jesse Levinson。
在John Dolan看來(lái),當(dāng)下的校企合作有利有弊:優(yōu)勢(shì)在于,學(xué)校可以分享實(shí)驗(yàn)數(shù)據(jù),但弊端在于,出于競(jìng)爭(zhēng)性的考慮,大多數(shù)行業(yè)巨擘會(huì)保留部分實(shí)驗(yàn)數(shù)據(jù)和結(jié)果,出于數(shù)據(jù)安全和商業(yè)機(jī)密的考慮。來(lái)自硅谷的大型企業(yè)往往雄心勃勃,他們具有極強(qiáng)的AI人才優(yōu)勢(shì)、大筆的融資和極強(qiáng)的算力支持,但這些硅谷的企業(yè)往往容易出于商業(yè)考慮,而忽視技術(shù)的穩(wěn)定性和可信度,這與實(shí)驗(yàn)室內(nèi)科學(xué)家們的嚴(yán)謹(jǐn)精神實(shí)際上存在沖突。
“我們需要堅(jiān)持我們的追求”,John Dolan笑道。
在自動(dòng)駕駛的先發(fā)企業(yè)競(jìng)速之外,中國(guó)市場(chǎng)正憑借巨大的市場(chǎng)潛能和雄厚的資本展現(xiàn)出后發(fā)優(yōu)勢(shì)。
而從John Dolan的學(xué)者角度看來(lái),中國(guó)的很多自動(dòng)駕駛的企業(yè)正在沖擊自動(dòng)駕駛的格局:2019年9月,安波福(Aptiv)全球工程副總裁韋峻青宣布加入滴滴自動(dòng)駕駛公司任CTO,向CEO張博匯報(bào)。韋峻青也是John Dolan的學(xué)生。而在36kr最新發(fā)布的2019 年「新經(jīng)濟(jì)之王」的榜單中,「小馬智行」、「文遠(yuǎn)知行」榜上有名,其中,「小馬智行」的創(chuàng)始人張一萌、「文遠(yuǎn)知行」技術(shù)SVP鐘華均為CMU校友。
而談及中國(guó)市場(chǎng),John Dolan說:“我們認(rèn)為向好的進(jìn)步正在發(fā)生。中國(guó)的自動(dòng)駕駛曾落后于美國(guó),但巨頭驅(qū)動(dòng)的中國(guó)市場(chǎng)無(wú)疑會(huì)迅速發(fā)展。”
據(jù)2018年麥肯錫未來(lái)出行研究中心發(fā)布的報(bào)告顯示,“中國(guó)未來(lái)可能成為全球最大的自動(dòng)駕駛市場(chǎng),直至2030年,自動(dòng)駕駛相關(guān)的新車銷售及出行服務(wù)創(chuàng)收將超過5000億美元。”目前,大量的中國(guó)企業(yè)正著手開發(fā)自動(dòng)駕駛技術(shù)架構(gòu)的核心構(gòu)成要素,包括激光雷達(dá)、攝像頭、處理器、軟件和地圖/基于位置的服務(wù)等。在2012至2017年間,約有70億美元的風(fēng)險(xiǎn)投資投入到中國(guó)的自動(dòng)駕駛技術(shù)企業(yè),這一數(shù)額與在同期投資于美國(guó)初創(chuàng)企業(yè)的金額相當(dāng)。中國(guó)的平均交易規(guī)模是7200萬(wàn)美元,是美國(guó)平均交易規(guī)模的兩倍。






















