


11月22日消息,據外媒報道,麻省理工學院計算機科學和人工智能實驗室(CSAIL)的研究人員開發了一種面向自動駕駛的AI系統,該系統可以對人類駕駛員的性格進行分類,以提高在復雜道路情況下的決策能力。
目前的自動駕駛AI主要假設所有人的行為都是一樣的,并花費無數的資源來適應不一樣的情況。這意味著要謹慎行事,例如,當人工智能試圖導航時,會在四向停車點上造成持續等待。這種謹慎降低了十字路口發生事故的可能性,但也可能導致其他危險,因為等待中的汽車后面和周圍的駕駛員會對其高度保守的駕駛行為做出反應,極有可能出現人類駕駛員追尾自動駕駛汽車的事故。
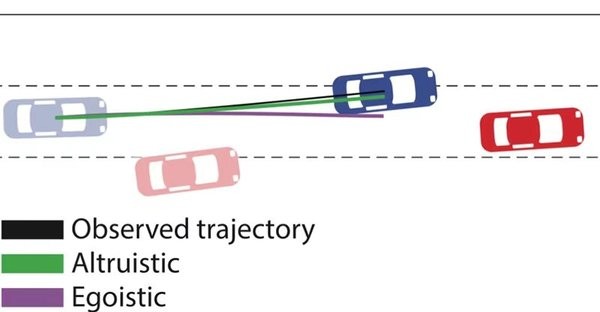
CSAIL團隊在論文中概述了如何使用社會心理學和博弈論的方法對人類駕駛員進行分類,從而對人工智能有所幫助。使用所謂的社會價值取向(SVO),司機的評分是基于個人的利己或利他合作的程度。其目的是訓練人工智能去給駕駛者分配一個SVO等級,在此基礎上創建風險評估,并利用這些信息來改變其自身的行為。
該研究論文的第一作者Wilko Schwarting說:“在自動駕駛汽車中創造更多類似人類的行為,對乘客和周圍車輛的安全至關重要,因為以可預測的方式行事能讓人類理解并恰當地對自動駕駛的行為做出反應。”
研究人員表示,該系統還可以為人類駕駛員開啟第二雙眼睛。在盲點探測到具有攻擊性的駕駛員時,系統可以在后視鏡中發出警報,讓駕駛員調整自己的駕駛模式。
據了解,目前該系統還沒有用于真正的道路上。但研究人員很快就會開始探索他們的模型如何適用于行人、自行車和其他道路使用者。他們還打算利用社會價值取向來幫助家庭機器人做出決策。






















