


在Waymo、特斯拉兩派背后,自動駕駛技術(shù)形成兩派,前者注重激光雷達(dá)、高精地圖,后者的方案則以視覺感知為主。在中國國內(nèi),車路協(xié)同技術(shù)又成為新的變量。成為一些自動駕駛初創(chuàng)公司的重要方案。
作為一家自動駕駛方案供應(yīng)商,紐勱科技從場景出發(fā),采用了以視覺為主、多傳感器融合的方案,目標(biāo)是在復(fù)雜場景中實現(xiàn)載人和運(yùn)貨。它的方案既包括L3/L4,又包括滿足當(dāng)下市場緊需的L2+,以及與智慧城市融合一體化的方案。
這些方案最終的目標(biāo)是量產(chǎn)上車。紐勱科技CEO徐雷表示,面向量產(chǎn)的自動駕駛解決方案,一定需要達(dá)到三個方面的要求:安全,高效,經(jīng)濟(jì)。
以安全為例,紐勱科技在系統(tǒng)冗余、傳感器冗余、緊急情況應(yīng)對措施以及備份的控制系統(tǒng)等方面進(jìn)行了充分考量和設(shè)計。基于對安全的考量,紐勱科技的方案還在功能安全、預(yù)期功能安全和網(wǎng)絡(luò)安全三部分進(jìn)行了重點(diǎn)設(shè)計。
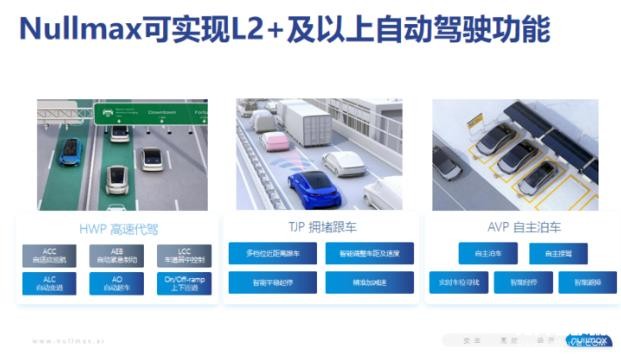
紐勱科技已經(jīng)獲得美國加州的自動駕駛路測牌照,并在2018年先后完成了擁堵跟車(TJP)、高速代駕(HWP)、自主泊車(AVP)功能等前裝量產(chǎn)功能的上線。今年8月,紐勱科技在上海正式落地L4級別的RoboTaxi項目。
以下為徐雷的演講速記整理,進(jìn)行了不改變原意的編輯:
在自動駕駛落地的道路上,無論是像我們一樣的自動駕駛方案開發(fā)者,還是像OEM這樣的自動駕駛方案需求方,為了自動駕駛的大規(guī)模量產(chǎn)落地,常常會思考很多問題。
量產(chǎn)方案究竟需要滿足哪些要素?在ADAS都還并不完美的當(dāng)下,實現(xiàn)自動駕駛是否真的具備可行性?無人駕駛究竟能否應(yīng)對所有場景?是否將交鑰匙式的方案直接裝到車上就能實現(xiàn)自動駕駛?
種種問題,最后又可以歸結(jié)為一個問題:自動駕駛的落地之路到底是怎樣的?
現(xiàn)在,自動駕駛行業(yè)主要有兩條不同的技術(shù)路線:一是以Waymo為代表,重激光、重地圖;二是以特斯拉為代表,將視覺感知作為主要的感知方式,通過攝像頭實現(xiàn)L4級別的自動駕駛。
相比之下,紐勱科技的路線與后者較為類似,在單車智能中采用以視覺為主的多傳感融合感知方案。但同時,我們也有著很大的不同,那就是不止于車端的智能,還采用智能車、智能道路、智慧城市的融合一體化方案。
一切從場景出發(fā)
在我們看來,自動駕駛應(yīng)從場景出發(fā)。
無論設(shè)計、測試還是商業(yè)化,都應(yīng)以場景為基礎(chǔ)。這里的場景,簡單來說,就是車和車以外的事物。而我們的最終目標(biāo),就是實現(xiàn)復(fù)雜場景下的無人駕駛載人和運(yùn)貨。
在紐勱科技的融合一體化的系統(tǒng)中,將車作為前端,車以外的部分作為后端。在每一種場景下,我們會思考車需要具備什么樣的能力才能安全可靠地行駛,并分別從前端和后端提供相應(yīng)的能力。
當(dāng)面對相對簡單的場景時,比如,結(jié)構(gòu)化道路里的高速場景,或低速行駛的場景,我們的方案可以通過車身所搭載的傳感器和計算能力,實現(xiàn)很好的自動駕駛。當(dāng)面對一些相對復(fù)雜的場景時,比如,十字路口、園區(qū)大門口,這些地方很可能連紅綠燈、車道線都沒有,僅依靠車本身的配置會很難達(dá)到充分安全可靠的行駛,所以,這時候需要讓系統(tǒng)具備更強(qiáng)的駕駛能力。
我們的思路是,把自動駕駛所需的能力——感知和規(guī)劃,最合理地分配到車和車以外的地方,也就是前面所說的前端和后端。
我們主要從兩個方面來實現(xiàn)。
在車端,以視覺感知為主、多傳感融合打造單車的智能,提供前裝量產(chǎn)的方案。在這個長期發(fā)展的過程中,具備自動駕駛功能的汽車將會越來越多,包括L2級別的智能網(wǎng)聯(lián)車。
與此同時,道路也在逐步升級,變得更加數(shù)字化、智慧化。那么,如何打造包含路側(cè)感知、路側(cè)規(guī)劃,并能與智能車融合的數(shù)字化道路,是一個很有挑戰(zhàn)的問題,而我們可以為政府、運(yùn)營商等提供方案。
最終,我們將基于智能汽車、智慧道路、智慧城市融合一體化的概念,提供能應(yīng)對復(fù)雜場景的L4方案。
具體而言,在以車為前端的單車智能方面,主要與車廠合作,從前裝量產(chǎn)方案切入。我們對場景有更深的理解,希望能通過與車廠在前裝方面的合作,將技術(shù)落地,并進(jìn)行數(shù)據(jù)迭代,不斷地優(yōu)化方案,實現(xiàn)復(fù)雜場景下的無人駕駛應(yīng)用。
同時,我們會在一些開放區(qū)域進(jìn)行無人駕駛的示范運(yùn)營,比如上海臨港地區(qū),從商業(yè)模式和技術(shù)模式上去論證方案的可行性。
當(dāng)前,從前裝角度看,L2+級別自動駕駛方案有著非常迫切的市場需求。
現(xiàn)在主流的自動駕駛應(yīng)用,大多是一些行駛和泊車兩大類型的輔助駕駛功能,并不能完全滿足市場對L2+甚至是L3的高級別自動駕駛需求。一些復(fù)雜場景的功能,如需要橫向控制參與的變道、超車處理,用于泊車的360度精準(zhǔn)感知,都是市場上需求很大的應(yīng)用。
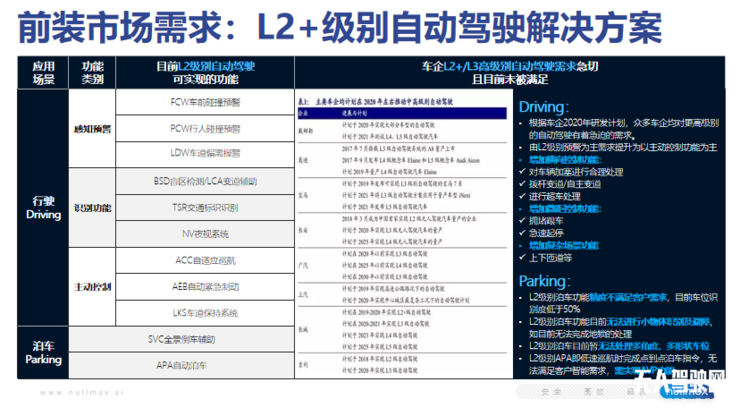
我們能夠提供L2+及以上功能的自動駕駛解決方案,并可以通過高端和經(jīng)濟(jì)兩種不同的配置,滿足不同的功能需求。
搭載高端配置的車輛,可以滿足全功能的需求,不僅具備一些復(fù)雜場景的自動駕駛功能,能夠應(yīng)對十字路口等城市環(huán)境下的行駛場景,還可以和智慧城市智能交通系統(tǒng)相結(jié)合,實現(xiàn)L4級別的自動駕駛功能。
經(jīng)濟(jì)配置則可以滿足部分的自動駕駛需求,如實現(xiàn)自主泊車、擁堵跟車這些自定義的功能。對前裝量產(chǎn)而言,成本非常重要,我們會提供基于ASIC芯片的低成本計算平臺打造的、以視覺為主的多傳感融合感知的方案,來實現(xiàn)所需的功能。
量產(chǎn)要滿足三要素
在我們看來,面向量產(chǎn)的自動駕駛解決方案,一定需要達(dá)到三個方面的要求:安全,高效,經(jīng)濟(jì)。
安全指的是必須有全方位的安全考量,要包含運(yùn)行方面的功能安全、預(yù)期功能安全以及網(wǎng)絡(luò)信息安全,從而提供真正安全的體驗。
比如,車輛如何進(jìn)入最小風(fēng)險狀態(tài),如何處理出現(xiàn)的各種問題。從技術(shù)角度來講,自動駕駛方案需要在融合后形成冗余的世界模型,并且需要具有一套安全的駕駛規(guī)則。而非為了確保安全,讓車的速度降到非常慢的程度,用戶很難喜歡這種方案。
其次是高效,自動駕駛方案不僅需要能夠高效地開發(fā)和應(yīng)用,同時還需要能為用戶提供高效的使用體驗,能在日常使用中為用戶解決出行中的難題和痛點(diǎn)。這樣的方案才真正有用。
第三是成本。無論硬件還是軟件,成本都是無法忽視的要素,功能所耗費(fèi)的成本需要與為客戶創(chuàng)造的價值相匹配。因為物超所值的方案才會受歡迎,才能形成規(guī)模化的應(yīng)用。
兼顧這三點(diǎn)的方案,才是可量產(chǎn)的自動駕駛駕駛解決方案。而我們的方案,也正是基于這些考慮完成的開發(fā)。
在安全方面,我們有著全面深入的設(shè)計考量。一般來說,自動駕駛的應(yīng)用場景發(fā)生變化,系統(tǒng)的性能也通常會有一些影響,如果是在開發(fā)完成后根據(jù)應(yīng)用的場景再去補(bǔ)充安全架構(gòu)和模塊,安全方面可能會存在問題。
所以我們的做法并不是先把功能開發(fā)完,然后再回過頭去想哪一塊不安全,再去加一些安全模塊。而是從設(shè)計、開發(fā),到功能實現(xiàn)、測試,其中的每一個環(huán)節(jié)都把安全放在第一的位置。
同時,為了保障在部分傳感器失效的情況下,系統(tǒng)依舊能夠去應(yīng)對出現(xiàn)的問題,我們提出了三層感知融合,進(jìn)行同一傳感器內(nèi)、不同傳感器之間以及世界模型構(gòu)建的融合。
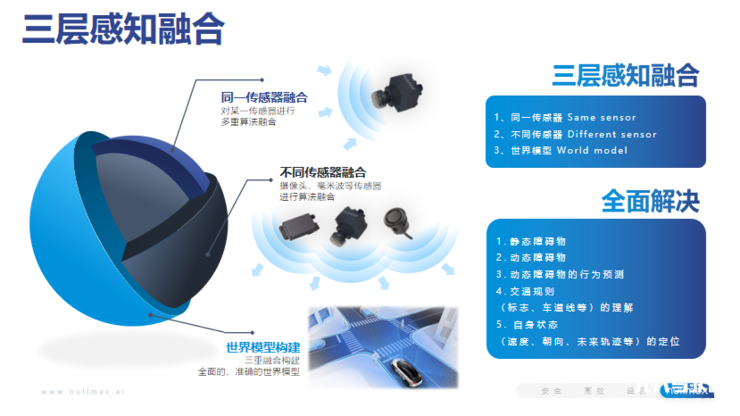
比如在攝像頭內(nèi)部,車道線可以基于深度學(xué)習(xí)算法和傳統(tǒng)的算法來分別完成;而在不同傳感器之間,比如前視的兩個攝像頭,可以通過雙目檢測來進(jìn)行測距,也可以通過雙目檢測可行駛區(qū)域是否有立體的東西,來判斷是否為平面。
另外,因為汽車存在于真實的物理世界,所以我們還會進(jìn)行模型層面的校驗,基于這些融合的信息會構(gòu)建一個冗余的世界模型。
這個世界模型是對周圍世界的理解,包括有靜態(tài)障礙物、動態(tài)障礙物、動態(tài)障礙物的行為預(yù)測、交通規(guī)則的理解、自身狀態(tài)的定位。在世界模型里,除了會預(yù)測一些處于動態(tài)的物體外,比如行駛中的車下一步會怎么行駛,我們還會預(yù)測一些暫時處于靜態(tài)的物體,比如行人站在十字路口的時候,通過他的身體語言去判斷其是否看到了本車,是不是有穿過馬路的意圖。
而在高效方面,我們的方案可以做到感知更全、識別更準(zhǔn)、反應(yīng)更快。
以泊車時的停車位檢測為例。全國各地有各種各樣的停車位,在實際使用中,市面上絕大部分泊車方案的車位檢測成功率不到50%,而我們基于視覺停車位檢測的成功率能達(dá)到90%以上。
我們對方案的要求不僅是車不發(fā)生碰撞,還有更重要的一點(diǎn)是,我們希望自動駕駛車能符合用戶的使用期望,就像真人駕駛一樣。這其中,對未來時間一定窗口內(nèi)場景變化的預(yù)測非常重要。
通常情況下,系統(tǒng)中會有很多模塊運(yùn)行,但是很難保證每一個模塊在任何情況下都能正常運(yùn)行。如果出現(xiàn)硬件失效或是感知受限等情況,比如攝像頭被遮擋,功能還能否安全地運(yùn)行呢?答案是可以,因為我們對系統(tǒng)有安全的冗余考量,配備了冗余傳感器、緊急操作模塊、備份系統(tǒng)。
此前我們曾強(qiáng)調(diào),自動駕駛由從場景所驅(qū)動,設(shè)計、開發(fā)、功能實現(xiàn)、測試、商業(yè)化運(yùn)用也都如此。所以,我們自己總結(jié)了一套比當(dāng)前市面上更健全的測試體系,針對L3及以上級別的自動駕駛進(jìn)行測試評價。其中,最重要的一點(diǎn)就是可量化的測試標(biāo)準(zhǔn)。
我們對開發(fā)的功能,在不同情況下進(jìn)行了測試和評分,根據(jù)我們自己的標(biāo)準(zhǔn),方案達(dá)到了良好水平,而根據(jù)行業(yè)的標(biāo)準(zhǔn),我們方案能達(dá)到優(yōu)秀水平。
基于車端和智慧道路的融合
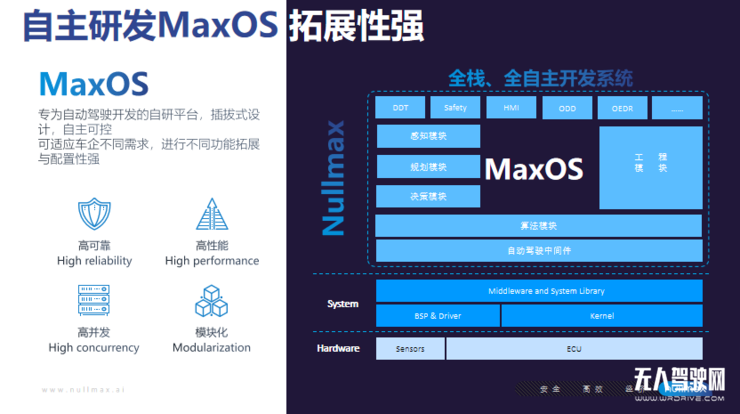
紐勱科技主要做的是L3/L4級別自動駕駛,L2+的方案為降級使用。我們自主開發(fā)了自動駕駛所需的全套上層應(yīng)用軟件和算法,包括配備了基礎(chǔ)通信庫、高性能計算庫、深度學(xué)習(xí)加速庫的自動駕駛專用平臺MaxOS,這也是我們自己開發(fā)的,所以我們的方案拓展性強(qiáng),很容易移植到不同平臺上,進(jìn)行各種定制化的開發(fā)。
此外,我們的方案不依賴于高精地圖和激光雷達(dá)。車本身具有足夠的智能,高精地圖可以加入其中作為補(bǔ)充,感知以視覺感知為主,不依賴于激光雷達(dá)。方案可以實現(xiàn)低成本高性能定位,定位精度達(dá)到厘米級。
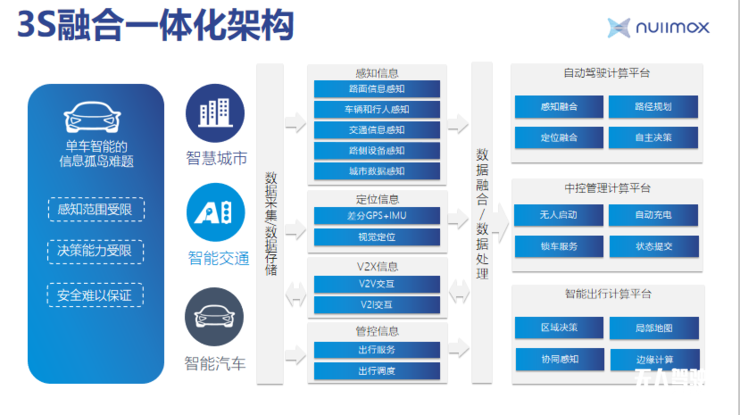
在車端實現(xiàn)這些智能功能后,再通過智能汽車、智能交通、智慧城市的深度融合,就能實現(xiàn)更復(fù)雜場景下的自動駕駛,進(jìn)行Robotaxi等更高級別自動駕駛的應(yīng)用。目前,我們正在和一些合作伙伴進(jìn)行這方面的測試和落地。
比如,在上海臨港地區(qū),我們已經(jīng)啟動基于融合一體化方案的Robotaxi項目,目前正在分階段地進(jìn)行落地,逐步擴(kuò)大車隊規(guī)模和運(yùn)營范圍。現(xiàn)在第一階段的工作已經(jīng)完成。
在先期的驗證測試中,我們的純視覺Robotaxi方案能夠應(yīng)對真實開放道路中出現(xiàn)的多種難點(diǎn)。
包括復(fù)雜場景下的行人和非機(jī)動車檢測和行為預(yù)測,遠(yuǎn)距離紅綠燈、異形紅綠燈的檢測,磨損或不規(guī)則車道線情況的應(yīng)對,實現(xiàn)十字路口調(diào)頭及復(fù)雜車流變道等功能,等等。這套方案并不是專門為該項目定制的方案,而是一套真正可以快速進(jìn)行部署的量產(chǎn)化方案。未來,我們還會在其他地方進(jìn)行落地。
總而言之,我們的自動駕駛落地之路就是:開發(fā)可量產(chǎn)的全棧方案,通過前裝提供高速代駕、擁堵跟車、自主泊車等高級別的自動駕駛功能;同時,我們將車輛與智慧道路和城市進(jìn)行深度融合,打造無人駕駛出租車。






















