


而為了解決這一問題,有不少公司采取了設定“冗余”系統的辦法,即在原來的系統上,增加一些余量,比如增加幾個傳感器的視覺系統,以增強汽車對于道路情況的觀察、判斷。
在本次GPU大會上,AutoX創始人肖健雄則在主題演講中提出了一種新的“全棧冗余”的設計理念,希望補齊無人駕駛普及中的最后一塊短板。

對于AutoX,外界并不陌生,其獨創的雙A.I.融合感知無人駕駛技術路徑,目標直指L4級別的完全無人駕駛系統。
AutoX創始人兼CEO肖健雄透露,目前公司已經實現在硅谷的普通路況長達7-8小時的無人工干預的無人駕駛。他在GTC大會上的演講中詳細介紹了公司的全棧冗余設計理念,整套冗余設計包括AI技術及工程技術兩大類,涉及從傳感器到AI系統,再到系統測試及復雜場景應對的各個環節。
他表示,“無人駕駛關乎生命,AutoX希望實現無人駕駛的絕對安全”。
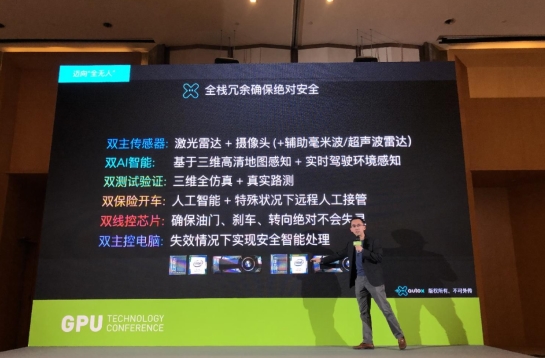
雙主傳感器+雙AI大腦
具體來說,首先在傳感器的選擇上,AutoX使用了雙主傳感器,即一個40線激光雷達加上6個環視攝像頭為主,同時輔助以毫米波雷達及超聲波雷達等傳感器,從而實現對周圍環境360度的感知。

圖為肖健雄與AutoX無人駕駛原型車
傳感器只是無人駕駛的五官,AI系統上,AutoX設計了雙AI智能。
“我們的無人駕駛有獨創的兩個AI大腦,第一個是基于三維高清地圖感知的AI大腦,第二套是實時的駕駛環境感知AI大腦。”

三維高清地圖一直被譽為是無人駕駛系統的記憶,其中記錄了道路環境的詳細信息,比如車道、交通信號燈、指示牌等信息,可以幫助AI系統做出行駛決策。高清地圖對L4級別的無人駕駛必不可少,也是百度、Google等公司的必爭之地。
但道路信息是鮮活的,并非一成不變,而且如果要在沒有地圖的全新路況實現無人駕駛,就需要第二套實時駕駛環境感知系統。
比如某段道路正在修理,樹立了新的交通指示牌,這種情況無法在三維高清地圖中提前標注,第二套AI大腦便會通過從視覺和激光雷達中獲取的信息進行實時路牌檢測,然后將其融合在地圖信息中,保證合法安全的無人駕駛。
與此同時,在整個城市的無人駕駛運營中,高清地圖總會出錯,通過環境感知AI大腦,可以將實時路況信息傳回服務器,保證地圖的即時更新。
肖健雄表示,這兩套AI大腦會同時進行運算,根據兩者的計算輸出魯棒性的融合結果。
遠程操控應對極端情況
以上是AutoX在AI技術上為保證冗余性所做的努力,而工程上的冗余性同樣重要。
“要落地無人駕駛,并不需要百分之百的無人,甚至可能永遠無法做到無人駕駛”,肖健雄表示。這話聽起來似乎自相矛盾,既然AutoX希望做到無人駕駛,為什么又說并不需要百分之百無人?
肖健雄解釋稱,這是因為技術無法窮盡所有的狀況,特別是在特別復雜的交通環境下,這時候無人駕駛應該如何處理?
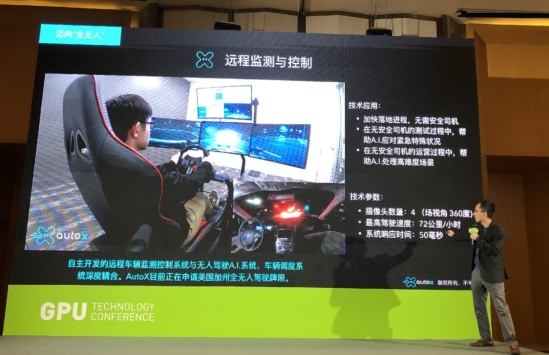
AutoX的解決方案是在特殊情況下用人工來解決,但人并不在車上,其設計了一套遠程操控系統,在必要情況下駕駛員可以遠程操作無人車,處理AI無法應對的情況。
“遠程控制并不像外界想像的那么簡單,因為網絡的原因,很多系統無法快速傳輸高清視頻,而我們的這套系統可以用手機網絡實時傳輸高清攝像頭信息,系統響應時間可以達到50毫秒以內,遠程操控的速度也可以達到72公里的時速”。
肖健雄表示,通過遠程操控應對特殊情況的方式,一位經過培訓的司機可以控制上百輛車,可以在降低整體運輸成本的同時,保證系統的安全性。
他還表示,AutoX的這套系統可以與車輛調度系統深度耦合,方便車輛的管理。目前公司也在申請美國加州全無人駕駛測試牌照,也就是測試車中不需要安全員,安全員可以在遠程監控。目前全美只有Google在不久前拿到了此測試牌照。
自主線控系統+仿真系統
除了遠程操控,AutoX在線控系統上亦做了冗余性設計。
線控系統是指用數字化的方式控制車輛的油門、剎車、轉向,這是無人駕駛車輛行駛的基礎,需要保證絕對不會失靈。
目前,線控技術主要掌握在少數國際Tier 1供應商手中,并有一些第三方車輛改裝公司在做線控系統。但第三方的系統在與自動駕駛公司的技術融合過程中,往往出現功能上沒問題,但在實測中失控的情況。
因此,AutoX自主研發了線控VCU,使用車規級的芯片,并經過嚴格的系統穩定性測試。系統中還有雙線控芯片,以確保在一塊芯片失靈時仍有備用方案。
最后,在無人駕駛系統測試方面,AutoX采用了三維全仿真與真實路測結合的方式。
路測是無人駕駛必不可少的環節,Waymo的無人駕駛之所以傲視群雄,一個關鍵因素在于其進行了最長的真實道路測試,總里程已經超過了800萬英里。
肖健雄表示,AutoX一方面正在進行越來越多的路測,另一方面自制了全新的仿真系統,讓系統在虛擬世界中進行無人駕駛測試。

仿真系統模擬了道路環境的物理設計、車輛的動力學及碰撞等信息,也模擬了下雨、夜間、光照直射等天氣情況,可以幫助加速無人駕駛系統的開發。試想一下,如果沒有仿真系統,對于所有具體的交通場景只能去實地測試,這會浪費大量人力成本,而仿真系統則可以進行實時的模擬測試,迅速驗證系統的可行性。
“仿真系統也是AutoX這兩年前能迅速實現無人駕駛的關鍵”,肖健雄表示。
目前,AutoX已經將全棧冗余設計的方式應用在了自己的無人駕駛系統中。今年8月,AutoX在美國加州發布了AutoX Autonomous Delivery(無人駕駛遞送)試運營服務,提供無人駕駛生鮮遞送服務,這在無人駕駛公司中尚屬首次。同時,AutoX正與上汽、福特等主機廠進行合作,推動無人駕駛的普及。
距離2020的無人駕駛之約只剩下不到兩年的時間,商業化和安全性已經成為無人駕駛技術公司共同的目標。通過全棧冗余設計的方式,AutoX無疑是希望自己成為最早摘得果實的那家。






















