


自汽車誕生以來,人類對(duì)于能夠自動(dòng)駕駛的汽車的想象就從未停止,在科幻小說和科幻電影中,總能看到自動(dòng)駕駛汽車的身影。現(xiàn)實(shí)中,人類對(duì)于自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)一直在付諸行動(dòng)。

前世今生
早在20世紀(jì)20年代,美國一家無線電控制公司在紐約大街上展示了一輛名為“Linrrican Wonder”的無線電控制自動(dòng)駕駛汽車,汽車上裝載了無線電接收裝置和控制單元。隨后半個(gè)世紀(jì)里,美國、英國等國家紛紛提出了自動(dòng)駕駛汽車的設(shè)想,通過在路面鋪設(shè)電路、磁條等方式引導(dǎo)和控制車輛按照一定軌跡和速率行進(jìn)。這類自動(dòng)駕駛技術(shù)被稱為引導(dǎo)式自動(dòng)駕駛,是實(shí)現(xiàn)自動(dòng)駕駛目標(biāo)的早期路徑,但受限于自動(dòng)化交通環(huán)境改造成本過大,引導(dǎo)式自動(dòng)駕駛研究在20世紀(jì)70年代逐漸擱淺。
20世紀(jì)80年代,德國和美國都推出了配備攝像頭、微處理器和其他傳感器等部件的自動(dòng)駕駛汽車,能夠在封閉環(huán)境下實(shí)現(xiàn)一定程度的自動(dòng)駕駛。進(jìn)入21世紀(jì)以后,得益于人工智能、云計(jì)算、大數(shù)據(jù)等新技術(shù)的飛速發(fā)展,自動(dòng)駕駛技術(shù)的研究才真正取得突破性進(jìn)展。2004年,美國國防部高級(jí)研究計(jì)劃局(DARPA)開始每年舉辦比賽吸引各科技團(tuán)隊(duì)來建造自動(dòng)駕駛汽車。正是這場(chǎng)賽事,開啟了自動(dòng)駕駛新革命,當(dāng)時(shí)參加此項(xiàng)賽事的眾多工程師們,已經(jīng)成為自動(dòng)駕駛汽車行業(yè)的中流砥柱,例如被譽(yù)為“谷歌自動(dòng)駕駛汽車之父”的斯坦福大學(xué)終身教授、人工智能專家Sebastian Thrun,他領(lǐng)導(dǎo)的團(tuán)隊(duì)獲得了2005年賽事冠軍。在高德納咨詢公司(The Gartner)推出的技術(shù)成熟度曲線中,自動(dòng)駕駛技術(shù)于2013年初次登上技術(shù)成熟度曲線,并于2015年上升至曲線頂峰位置,已成為當(dāng)下最炙手可熱的新技術(shù)之一。越來越多的研究機(jī)構(gòu)和企業(yè)開始研發(fā)自動(dòng)駕駛技術(shù),其中不但有傳統(tǒng)汽車制造商,也有互聯(lián)網(wǎng)企業(yè)。
如今,在美國硅谷的Google總部附近,常常能看到方向盤前沒有人的汽車在路上行駛,這在當(dāng)?shù)匾呀?jīng)不是什么新鮮事。部分低速或封閉環(huán)境下的自動(dòng)駕駛汽車已經(jīng)投入商用。曾經(jīng)存在于人類想象中的自動(dòng)駕駛汽車正在離人們的生活越來越近。
技術(shù)原理
自動(dòng)駕駛汽車是一個(gè)復(fù)雜的系統(tǒng)工程,須由多種硬件、軟件協(xié)同發(fā)揮作用。一般而言,所有的自動(dòng)駕駛系統(tǒng)均可大致分為三大部分,即環(huán)境感知、行為決策和運(yùn)動(dòng)控制。系統(tǒng)的構(gòu)成類似于人的駕駛行為決策過程。環(huán)境感知模塊,人類用眼睛觀察路況,而自動(dòng)駕駛系統(tǒng)則是借助激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)、攝像頭等傳感器來獲取道路環(huán)境信息,用GPS(全球定位系統(tǒng))和IMU(慣性測(cè)量單元)獲取車身定位信息。行為決策模塊,人類用大腦處理環(huán)境信息結(jié)合駕駛經(jīng)驗(yàn)作出判斷,自動(dòng)駕駛系統(tǒng)通過算法提取傳感器中的有用信息,將信息轉(zhuǎn)換至統(tǒng)一坐標(biāo)系下進(jìn)行信息融合,并根據(jù)融合信息、路網(wǎng)信息和自身行駛狀態(tài),按照一定規(guī)則產(chǎn)生駕駛決策。運(yùn)動(dòng)控制模塊,人類根據(jù)決策通過手腳控制車輛方向盤、加速和剎車,自動(dòng)駕駛系統(tǒng)則是根據(jù)產(chǎn)生的駕駛決策輸出至控制器來控制車輛。
自動(dòng)駕駛的分級(jí)
自動(dòng)駕駛技術(shù)的研發(fā)是漸進(jìn)式的,都有相應(yīng)的規(guī)范和標(biāo)準(zhǔn),需要明確的分級(jí)標(biāo)準(zhǔn)來引導(dǎo)行業(yè)發(fā)展。目前對(duì)于自動(dòng)駕駛分級(jí)最為權(quán)威的標(biāo)準(zhǔn)是美國汽車工程師協(xié)會(huì)(SAE)的J3016標(biāo)準(zhǔn),將自動(dòng)駕駛分為6個(gè)等級(jí),并明確了不同級(jí)別間的差異,如表1所示。

表1:SAE自動(dòng)駕駛的分類
自動(dòng)駕駛依賴于“高精地圖”
人類駕駛是通過眼睛、耳朵等器官去感知車身周邊環(huán)境,憑借道路記憶或傳統(tǒng)導(dǎo)航地圖,依靠駕駛經(jīng)驗(yàn)及技巧保證汽車安全行駛并到達(dá)目的地。自動(dòng)駕駛系統(tǒng)用傳感器替代了人類感官,用地圖替換了人的道路記憶,用軟件、云計(jì)算、深度學(xué)習(xí)等替代了駕駛經(jīng)驗(yàn)及技巧。地圖之于自動(dòng)駕駛的核心作用在于降低環(huán)境感知的難度,提供更加完善的周邊環(huán)境以及更精準(zhǔn)的定位精度和可靠性,供自動(dòng)駕駛汽車進(jìn)行行為決策。
目前,主流的自動(dòng)駕駛技術(shù)方案分為兩類技術(shù)路徑:一是“強(qiáng)地圖”,依賴地圖等提供先驗(yàn)知識(shí),傳感器將感知的環(huán)境信息模型與地圖匹配以確定車輛位置,并探測(cè)障礙;二是“強(qiáng)感知”,降低地圖精度、地圖要素等方面要求,將其作為傳感器的補(bǔ)充,傳感器感知周邊環(huán)境并建立實(shí)時(shí)環(huán)境模型,依靠深度學(xué)習(xí)理解傳感器信息并做出反應(yīng)控制車輛。目前業(yè)內(nèi)對(duì)于地圖是自動(dòng)駕駛不可或缺的認(rèn)識(shí)是統(tǒng)一的,但對(duì)于“自動(dòng)駕駛需要什么樣的地圖”的認(rèn)識(shí)尚存在分歧。從實(shí)際應(yīng)用來看,“強(qiáng)地圖”方案在當(dāng)前技術(shù)水平下可行性更高,“強(qiáng)感知”方案在技術(shù)和可靠性上尚待突破,走在自動(dòng)駕駛技術(shù)前沿的公司采用的方案均為搭配高精地圖的方案。
自動(dòng)駕駛汽車?yán)锏牡貓D是什么樣的
自動(dòng)駕駛汽車?yán)锏牡貓D的名稱有多種說法,例如高精地圖,它是從國外H i g h Definition Map(HD Map)的說法直譯過來的名詞,此外還有高度自動(dòng)駕駛地圖(Highly Automated driving map,HAD Map),高可信地圖(Hoch Genaue Karte,德語)等說法。上述說法都不太嚴(yán)謹(jǐn),準(zhǔn)確來說,應(yīng)該稱為“自動(dòng)駕駛地圖”或“自動(dòng)駕駛專題地圖”,即用于自動(dòng)駕駛汽車的專題地圖,類似于地形圖、行政區(qū)劃圖等用于某一專題功能的地圖。
實(shí)際上,自動(dòng)駕駛地圖是為自動(dòng)駕駛車輛構(gòu)建了一個(gè)映射現(xiàn)實(shí)的虛擬道路環(huán)境模型。它包含最底層的靜態(tài)高精度地圖、動(dòng)態(tài)駕駛環(huán)境(擁堵情況、道路事故、施工等信息)、互聯(lián)設(shè)施(V2V、V2X等通信設(shè)施)以及移動(dòng)物體(行人、車輛等)信息。底層的靜態(tài)高精度地圖是其中的重中之重,當(dāng)前典型的靜態(tài)高精度地圖是矢量高精圖,也被稱之為語義地圖,它包含道路屬性(車道數(shù)、施工狀態(tài)等)、車道模型(車道線、曲率/坡度、中心線、車道屬性變化等)、交通設(shè)施模型(交通信號(hào)燈、斑馬線、停止線、交通標(biāo)志等)等內(nèi)容(如圖1所示)、定位對(duì)象(用于實(shí)現(xiàn)車輛自定位)。
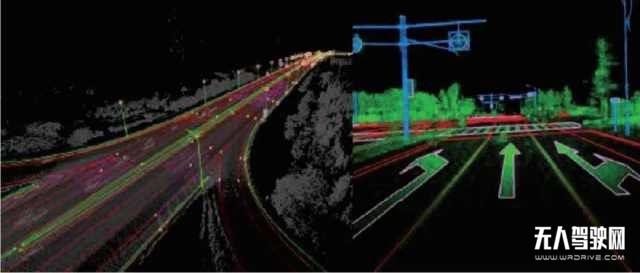
圖1:靜態(tài)高精度地圖的部分內(nèi)容
目前,各圖商制作的自動(dòng)駕駛地圖在高精度地圖表現(xiàn)形式上存在差異,包括矢量高精地圖、柵格圖、激光雷達(dá)占位圖、反射率圖等。由寶馬、大眾、戴勒姆等歐美車廠共同成立的導(dǎo)航數(shù)據(jù)標(biāo)準(zhǔn)協(xié)會(huì)(Navigation Data Standard Association,NDS),近年來一直在定義自動(dòng)駕駛地圖的統(tǒng)一標(biāo)準(zhǔn),通過制定統(tǒng)一標(biāo)準(zhǔn)使各圖商間的自動(dòng)駕駛地圖產(chǎn)品兼容、適配。
與傳統(tǒng)導(dǎo)航電子地圖相比,自動(dòng)駕駛地圖的內(nèi)容、形態(tài)、制作工藝等存在較大差別,且復(fù)雜度更高,具體如表2所示。
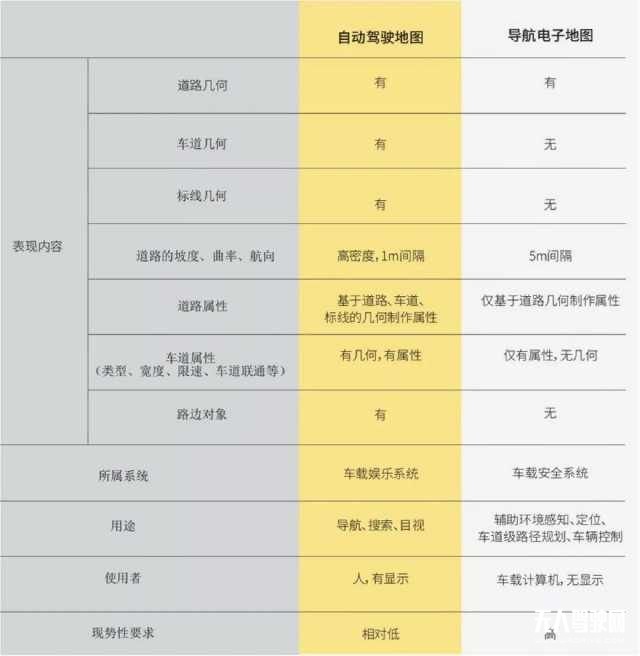
表2:自動(dòng)駕駛地圖與導(dǎo)航電子地圖的部分差異
自動(dòng)駕駛地圖面臨的挑戰(zhàn)
作為一個(gè)新興事物,自動(dòng)駕駛地圖在高速發(fā)展的同時(shí),也面臨著諸多挑戰(zhàn)。首先,自動(dòng)駕駛地圖到底是什么樣的?目前全球還未有達(dá)到Level3級(jí)別自動(dòng)駕駛量產(chǎn)車問世,根據(jù)各大車廠的時(shí)間表,Level3級(jí)別的自動(dòng)駕駛車輛將在2020年左右量產(chǎn)。各大圖商所制作的自動(dòng)駕駛地圖大多數(shù)是面向Level3級(jí)別自動(dòng)駕駛汽車。從Level3到Level4,從Level4到Level5的自動(dòng)駕駛技術(shù)難度比Level2到Level3要大得多,這兩個(gè)級(jí)別的自動(dòng)駕駛技術(shù)差異巨大,所依賴的自動(dòng)駕駛地圖也將發(fā)生變化,這個(gè)變化目前還不可知。
其次,自動(dòng)駕駛地圖到底需要多高的精度?自動(dòng)駕駛地圖中,不同數(shù)據(jù)內(nèi)容所需的精度要求是不同的,例如車道寬度精度要求在±10cm,交通標(biāo)志牌精度要求在±50cm,綠化帶精度要求在±20cm等。不同場(chǎng)景所需的精度要求不同,例如在隧道、室內(nèi)的場(chǎng)景,由于定位精度達(dá)不到±10cm,其他要素如車道寬度的精度即使達(dá)到±10cm也沒有意義。
再次,自動(dòng)駕駛地圖的更新問題。自動(dòng)駕駛地圖的更新頻率要比傳統(tǒng)導(dǎo)航電子地圖高得多。目前自動(dòng)駕駛地圖的制作還是依賴專業(yè)化的采集隊(duì)伍,更新頻率還達(dá)不到自動(dòng)駕駛要求,且隨著更新頻率、精度的提升,地圖生產(chǎn)成本急劇上升,單單依靠圖商的力量無法滿足要求。未來要實(shí)現(xiàn)地圖動(dòng)態(tài)更新,必然要采用眾包方式。圖商通過構(gòu)建地圖更新體系,將數(shù)據(jù)提供給政府、車廠、普通用戶甚至其他圖商,使用者通過不斷回傳數(shù)據(jù)來更新地圖。但這其中要解決的問題還有很多,例如數(shù)據(jù)的可靠性和精度,更新閉環(huán)能否無縫銜接,用戶提供數(shù)據(jù)的意愿,安全保密問題等等。
自動(dòng)駕駛地圖的政策問題
從自動(dòng)駕駛地圖的定義、內(nèi)容來看,其仍然是屬于地圖的范疇。自動(dòng)駕駛地圖的法規(guī)政策問題在國際上一直存在,只是各國尚未針對(duì)自動(dòng)駕駛地圖進(jìn)行專門立法,自動(dòng)駕駛地圖的制作和使用仍然適用于各國測(cè)繪地理信息法律法規(guī)。從現(xiàn)行自動(dòng)駕駛發(fā)展較快的國家的測(cè)繪和數(shù)據(jù)法律法規(guī)來看,各國對(duì)于安全問題特別是國防安全和國家利益都十分重視,只是因國情的差異,各國在法規(guī)政策的側(cè)重點(diǎn)上有所不同。例如,美國最大限度地放開了地理信息使用和共享,以保持其在世界的領(lǐng)先地位,在自動(dòng)駕駛地圖準(zhǔn)入管理、數(shù)據(jù)出境等方面均沒有限制。德國特別重視個(gè)人隱私數(shù)據(jù)的保護(hù),在滿足個(gè)人隱私保護(hù)的基礎(chǔ)上,盡可能減少限制。日本較美、德更為保守,政府在自動(dòng)駕駛地圖的發(fā)展中起核心主導(dǎo)作用,地圖基礎(chǔ)數(shù)據(jù)的采集和研發(fā)均由名為動(dòng)態(tài)地圖計(jì)劃(Dynamic Map Planning Co.,Ltd,DMP)的平臺(tái)公司統(tǒng)一進(jìn)行,日本的管理政策在準(zhǔn)入管理、成果匯交均有相關(guān)規(guī)定。韓國的自動(dòng)駕駛地圖也是由政府主導(dǎo),其管理政策在執(zhí)業(yè)資格、準(zhǔn)入管理、成果匯交、數(shù)據(jù)出境方面規(guī)定更為嚴(yán)格。我國主要出于國家安全方面的考慮,也形成了特色的法規(guī)政策。根據(jù)《關(guān)于加強(qiáng)自動(dòng)駕駛地圖生產(chǎn)測(cè)試與應(yīng)用管理的通知》,我國仍然將自動(dòng)駕駛地圖作為導(dǎo)航電子地圖進(jìn)行管理,從保密安全、資質(zhì)管理、公開地圖內(nèi)容表示、地圖審查、外商投資等方面對(duì)自動(dòng)駕駛地圖都存在限制,對(duì)自動(dòng)駕駛地圖的發(fā)展造成一定影響。考慮到自動(dòng)駕駛的蓬勃發(fā)展勢(shì)頭,按照“底線思維”適時(shí)調(diào)整我國自動(dòng)駕駛政策迫在眉睫。






















