


無人駕駛裹足不前并不是單方面的原因,其中牽涉到數目眾多、類目龐雜的供應鏈體系,這其中既有之前提及的智能機械軟件方面的突破,也有眾多基礎硬件的發展。那么,無人駕駛最為倚賴的有哪些硬件呢?
高精度地圖
可以說高精度地圖是無人駕駛發展過程中最不可或缺的一環,其中因果關系恰如人類一般,一個陌生的環境和一個熟悉的環境,對于人類這種高級生物的判斷時間有著顯而易見的影響。
當然,無人駕駛汽車依然可以通過「眼睛」「鼻子」「聽覺」在陌生的環境中行走,但如果腦海中有一個內容詳盡豐富、持續更新的高清數字地圖,在效率上則要更有優勢,也更安全。

過去,無人駕駛通過GPS確定位置,但GPS卻始終無法消除坐標與真實距離之間的誤差,這種誤差直接導致無人駕駛汽車在處理一些細節時缺乏數據支撐,因此工程師開始通過其他方式彌補GPS數據的低精度問題。
不過早期的無人駕駛比較注重數字地圖的數據存儲,其次才是實時GPS定位及其產生的數據,但隨著技術的提高,汽車操作系統已經可以越來越精確的計算當前位置,因為傳感器能夠精確捕捉周圍環境的特征,并通過實時數據流形成可靠的視覺提示。
高精度地圖不同于傳統地圖,高精度地圖不光可以反映大型地理特征,比如高山湖泊,也能反映樹木、人行橫道等微觀地形細節。應用于無人駕駛領域的高精度地圖更是可以標注出車道線、道路施工標志、路口交叉點等靜態數據。
數碼相機
雖然腦海中已經有了三維地圖等數據,但依然需要數碼相機像人眼一樣在數據流中捕捉車外環境。通過數碼相機的成像,工程師迫切希望將這些越來越高清的圖片應用到汽車操作系統的深度學習中。
不同于常規的數碼相機,應用于無人駕駛的數碼相機并不會原封不動的將所有數據都傳輸至中樞,而是將圖像進行分析后,排除掉不相關信息,然后傳輸。至于高級無人駕駛攝像機的處理方式就更到位了,它先處理圖像的數據,把檢測到的物體列成清單,并把結果制成表格,再傳輸給中樞控制系統。

不過,數碼相機還是有缺陷。正如人類一樣,人類的兩只眼可以非常輕松的判斷物體的深度感知,從而產生「立體視覺」。數碼相機是沒有「立體視覺」的,這是限制數碼相機更廣泛應用的最大問題之一:數碼相機會把三維信息處理成二維,也因此遺漏了十分重要的信息:物體與相機之間的距離。
當然,工程師考慮過很多方法,比如在車內設置多個相機,幫助車輛建立3D視覺系統,但相比較結構光相機來說,多臺相機的方案有些奢侈。
結構光相機如今已經在手機上應用了,它通過相機和物體之間的距離繪制精確的三維圖形,使圖片有了深度信息。不過,結構光相機依然有缺陷,其最大的弱點是投射的光線在日光充足的白天時段容易運行不暢,而且投出的光線容易受到自然光的干擾,一旦物體距離超過10米,結構光會喪失感知能力。因此,工程師認為結構光的方案比較適合光線穩定的室內,比如停車場和車庫。
所有的數碼相機都有一個缺陷:污垢。這種精密的儀器一旦沾上污垢,就不能正常工作,所以路邊的揚塵、沙土、鳥糞這些汽車經常遇到的狀況讓無人駕駛應用數碼相機十分擔憂。為此,許多方案提出可以像雨刮一樣,為數碼相機安裝一個特定的清潔器。
不過,數碼相機隨著技術的發展,未來有望在濃霧、暴雨、炫目的環境中依然有辦法識別路況,只是目前來說缺點比較明顯。
激光雷達
數碼相機不能感知距離,激光雷達可以,甚至可以說激光雷達是最理想的測量工具。原因是激光是平行光,它不會發散,衰弱較小,因此無論物體是一步之遙還是百米之遠,光都可以始終保持準直,而根據反射則可以有效判斷物體距離。
如果將激光雷達成球形分布,通過對周邊環境的掃描,激光雷達同樣可以擁有部分數碼相機的功能,通過一個個距離可知的點,激光雷達可以將周邊大概環境繪制出來,這個環境里,汽車可以識別每一個物體的距離,唯一可惜的是激光雷達是色盲。
激光雷達與數碼相機的另外一點不同就是成像時間,激光雷達不停旋轉,持續更新所產生的數值模型和數碼相機「咔擦」一下的成像速度還有些距離,這種距離就導致它可能可以應付擁堵路況下的數據收集,但不能應用于緊急交通狀況下,汽車需要的瞬時影像數據。
不過也有無人駕駛企業不看好激光雷達的發展,其中特斯拉CEO埃隆·馬斯克就曾經表示:
「我認為人們無須使用激光雷達,無源光外加前置雷達就能做到這一切。事實上,即使沒有激光雷達也能徹底解決問題,我不看好激光雷達,它在這種情況下不起作用。」
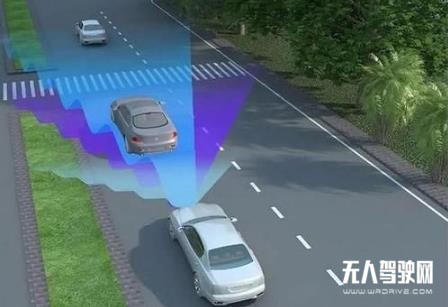
雷達
這里的雷達是無線電雷達,是利用無線波感知周邊信息的硬件設備。雷達最初應用于軍事領域,建立高高的鐵塔用來感知敵軍的飛機、導彈和船只的蹤跡。同樣,雷達也可以在高速公路上測量往來車輛的時速。
雷達比較小巧、穩定,所以目前大多應用于感知車輛周圍其他車輛的速度和位置,比如定速巡航技術,根據雷達的判斷調控油門和剎車,另外一點是駕駛輔助,當有車輛靠近司機視線盲區時,系統發出警示。
常規的雷達由發射器和接收器組成,發射器負責發射電磁波,接收器隨時準備接收回波,雷達傳感器利用電磁波的反射檢測周圍環境中物體的出現。這樣的工作原理決定了雷達可以穿透數碼相機和激光雷達無法穿透的濃霧、暴雨、炫目等惡劣環境。
另外一點值得肯定的是雷達能輕易穿透非導電性物體和薄型材料,所以即便高速公路上有飛舞的塑料袋也不會影響工作效果。
至于利用電波判斷物體距離有些類似于人類的耳朵,當汽車向你飛馳而來的時候,聲音越來越大,越來越急促,而擦過身邊時,聲音逐漸變小,越來越平緩。所以,雷達不光可以檢測物體距離,也可以感知物體移動速度。
雷達還有缺點,它的分辨率相對較低,提供的數據相對有限,但雷達和視覺傳感器結合在一起的話,配合數碼相機或者激光相機的三維圖像,無人駕駛就已經接近最后完美的答案了。
除了上述幾項基礎硬件設施之外,無人駕駛還依賴超聲波傳感器也就聲吶、全球定位系統(GPS)、慣性測量單元和線控技術。其中全球定位系統主要是精度不夠,而慣性測量單元則是時時刻刻檢測輪胎運行狀況,如果車輛發生失控,比如冰面、沙漠等特殊路面,無人駕駛汽車可以自我意識到已經失控,并主動介入調整。
好在上述硬件都符合摩爾定律,甚至說如今的大多數硬件傳感器已經可以在理論數據方面滿足無人駕駛的水平,未來隨著性能提升、價格下降,無人駕駛擺脫硬件桎梏之后,才會最終攻克最后一道難題「深度學習」。






















