


“無人駕駛”這個詞在2018年可謂是出盡了風(fēng)頭,國內(nèi)各種互聯(lián)網(wǎng)巨頭加持,不可謂不熱鬧,無人駕駛似乎成了解決現(xiàn)在互聯(lián)網(wǎng)公司焦慮的“萬金油”。估值是懸在這些上市公司的一把利劍,他們需要給股東們講一個沒有天花板的故事,而充滿烏托邦意味的無人駕駛場景應(yīng)該會是一個讓人熱血沸騰的故事。
在2018年7月4日的百度 AI 開發(fā)者大會上,百度集團(tuán)的創(chuàng)始人李彥宏宣布作為全球首款的L4 級量產(chǎn)自動駕駛巴士‘阿波龍’已經(jīng)量產(chǎn)下線,目前也已投入到多個園區(qū)的運(yùn)營中。
2018年6月18日上午,京東在北京海淀區(qū)的上地配送站,投放了20余臺京東配送機(jī)器人,首批載有618訂單的京東配送機(jī)器人從上地站發(fā)出,這一事件讓京東賺足了眼球,也預(yù)示著快遞無人配送時代可能真的要來臨了。
2018年9月19日杭州云棲大會開幕,菜鳥ET物流實(shí)驗(yàn)室在現(xiàn)場發(fā)布了兩款新零售物流無人車,車上分別搭載了刷臉取件柜、零售貨架等。
對于無人駕駛,如果無法做到100%準(zhǔn)確,那基本上在工程上就是失敗的,宣傳上也只能是噱頭大于實(shí)際,但是對于科技行業(yè)始終都需要抱著一顆敬畏的心,很多事情很可能是“不是不到只是時候未到”,一旦獲得關(guān)鍵技術(shù)的突破,市場的需求也就會立馬釋放出來,而和無人駕駛密切相關(guān)的“高精地圖”目前也是制約無人駕駛發(fā)展的關(guān)鍵技術(shù)。
2
無人駕駛方案各大廠商大同小異,但是基本的邏輯是相同的,從學(xué)習(xí)的角度來看,目前已經(jīng)開源的百度Apollo無疑是一個極好的途徑,下面是百度的Apollo無人駕駛的軟件架構(gòu)以及關(guān)鍵模塊的說明。
Perception(感知) — 感知模塊識別自動駕駛車輛周圍的世界。感知中有兩個重要的子模塊:障礙物檢測和交通燈檢測。
Prediction(預(yù)測) — 預(yù)測模塊預(yù)測感知障礙物的未來運(yùn)動軌跡。
Routing(路由) — 路由模塊告訴自動駕駛車輛如何通過一系列車道或道路到達(dá)其目的地。
Planning(規(guī)劃) — 規(guī)劃模塊規(guī)劃自動駕駛車輛的時間和空間軌跡。
Control(控制) — 控制模塊通過產(chǎn)生諸如油門,制動和轉(zhuǎn)向的控制命令來執(zhí)行規(guī)劃模塊產(chǎn)生的軌跡。
CanBus — CanBus是將控制命令傳遞給車輛硬件的接口。它還將底盤信息傳遞給軟件系統(tǒng)。
HD-Map(高精地圖) — 該模塊類似于庫。它不是發(fā)布和訂閱消息,而是經(jīng)常用作查詢引擎支持,以提供關(guān)于道路的特定結(jié)構(gòu)化信息。
Localization(定位) — 定位模塊利用GPS,LiDAR和IMU的各種信息源來定位自動駕駛車輛的位置。
HMI — Apollo中的HMI和DreamView是一個用于查看車輛狀態(tài),測試其他模塊以及實(shí)時控制車輛功能的模塊.
監(jiān)控 — 車輛中所有模塊的監(jiān)控系統(tǒng)包括硬件。
Guardian — 新的安全模塊,用于干預(yù)監(jiān)控檢測到的失敗和action center相應(yīng)的功能。執(zhí)行操作中心功能并進(jìn)行干預(yù)的新安全模塊應(yīng)監(jiān)控檢測故障。
從上面的軟件架構(gòu)圖可以看出,高精地圖(High Definition Map)在整個方案中是最根本的技術(shù)支撐,上層的定位、感知、規(guī)劃均依賴高精地圖,用百度工程師的話來說,L3以上的自動駕駛?cè)绻麤]有高精地圖作為支撐則無從談起。
高精地圖不同于我們平時使用的電子地圖,它是專門為駕駛機(jī)器人設(shè)計的地圖。機(jī)器通過存儲可以具備極強(qiáng)的記憶能力,而在視覺分析和邏輯判斷上則比較弱,比如:你可以根據(jù)看到的東西和 GPS 提供的信息確定你自己的位置;還能輕松準(zhǔn)確地識別障礙物、其他車輛、行人和交通信號燈。但這對無人駕駛汽車來說是一項非常艱巨的任務(wù)。正因如此,高精度地圖是當(dāng)前無人駕駛汽車技術(shù)不可或缺的一部分,下面從定位、感知、規(guī)劃三個方面展開討論高精地圖和無人駕駛的關(guān)系。
我們要在高精度地圖上進(jìn)行定位,這就意味著我們需要弄清楚我們在地圖上的位置。RTK+慣導(dǎo)是我們常用的組合定位方法,RTK在空曠區(qū)域定位效果好,但是它更新頻率低,容易受遮擋影響,這個時候需要引入頻率更高的慣性導(dǎo)航進(jìn)行輔助,但是慣導(dǎo)容易產(chǎn)生誤差累計,因而在極端環(huán)境下這兩種組合也不能做到萬無一失,這時候就需要引入攝像機(jī)或者激光雷達(dá),通過這兩種設(shè)備進(jìn)行圖像以及點(diǎn)云數(shù)據(jù)的收集并進(jìn)行特征提取,然后將這些特征和高精地圖中的特征進(jìn)行對比并融合組合定位數(shù)據(jù)從而推斷出車輛自身的位置,百度Apollo使用卡爾曼濾波的方法進(jìn)行傳感器數(shù)據(jù)融合。
無人駕駛汽車可以使用高精度地圖來幫助感知,攝像機(jī)、激光雷達(dá)和雷達(dá)探測物體的能力在超過一定距離后都會受到限制,在惡劣的天氣條件或夜間,傳感器識別障礙物的能力可能會進(jìn)一步受到限制。另外,當(dāng)汽車遇到障礙時,傳感器無法透過障礙物來確定障礙物后面的物體。在這種情況下,高精度地圖可以將交通信號燈的位置提供給軟件棧的其余部分,幫助汽車做出下一個決策。
高精度地圖可以幫助車輛找到合適的行車空間,還可以幫助規(guī)劃器確定不同的路線選擇,并幫助軟件確定道路上其他車輛在將來的位置。高精度地圖可幫助車輛識別車道的確切中心線,這樣車輛可以盡可能地靠近中心行駛,在具有低速限制、人行橫道或減速帶的區(qū)域,高精度地圖能讓無人駕駛汽車提前查看并預(yù)先減速。更重要的是,如果前方有障礙物,車輛可能需要變道,高精度地圖可以幫助車輛縮小選擇范圍,以便選擇最佳方案。
3
高精地圖現(xiàn)在的采集方式分為兩種:集中式采集和眾包采集模式。“眾包制圖”是一種地圖數(shù)據(jù)采集生產(chǎn)模式,相對應(yīng)的是“集中制圖”,兩者在地圖行業(yè)都不是什么新名詞。目前有BAT背景的、規(guī)模較大經(jīng)驗(yàn)豐富的老牌地圖公司,比如高德地圖、四維圖新、百度地圖都是集中制圖,自主采集和生產(chǎn)、加工高精地圖;而一些規(guī)模小、新進(jìn)入的初創(chuàng)公司,比如寬凳科技、Momenta等,都是眾包制圖模式。
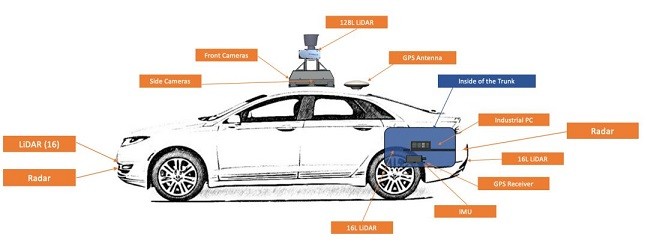
集中制圖的廠商一般采用激光模式,采集依靠專業(yè)采集車,采集設(shè)備有幾個比較核心的部件,包括激光雷達(dá)、IMU(慣導(dǎo)系統(tǒng))、GNSS、高精度輪速儀以及相機(jī)等。只有專業(yè)的、高性能、高精度的采集設(shè)備,才能保證最終高精地圖數(shù)據(jù)的精度。目前采用集中制圖的高德地圖,提供的高精地圖相對精度可以達(dá)到10cm以內(nèi),而高德地圖和千尋位置合作推出的“高精地圖+高精定位”一體化解決方案,車道級定位效果能夠?qū)崿F(xiàn)普通道路條件下橫向誤差和縱向誤差在7cm以內(nèi),高速/城市環(huán)路條件下橫向誤差6cm,縱向誤差5cm以內(nèi)。
大部分初創(chuàng)地圖公司的眾包制圖,是采用視覺模式(相機(jī)、攝像頭)替代專業(yè)采集車的激光雷達(dá),優(yōu)點(diǎn)是成本低,數(shù)據(jù)來源廣,但數(shù)據(jù)亂、精度差,靜態(tài)數(shù)據(jù)精度和依靠專業(yè)設(shè)備采集的高精地圖尚不能同日而語,更多是作為高精地圖動態(tài)數(shù)據(jù)部分的補(bǔ)充。高精地圖也需要為自動駕駛提供動態(tài)、實(shí)時的數(shù)據(jù)服務(wù),比如動態(tài)交通信息、智慧紅綠燈等交通設(shè)施信息、施工等臨時或突發(fā)信息等,這部分動態(tài)數(shù)據(jù)更適合由眾包制圖模式來實(shí)現(xiàn)。
4
高精地圖分為兩個層級,下層的是靜態(tài)高精地圖,上層是動態(tài)高精地圖。
靜態(tài)高精地圖中包含了車道模型、道路部件、道路屬性和其他的定位圖層,這是現(xiàn)階段圖商重點(diǎn)在做的。首先高精地圖要滿足車道級的自動駕駛導(dǎo)航,因此需要包含道路細(xì)節(jié)信息,如車道線、車道中心線、車道屬性變化等,比如能讓汽車知道哪些區(qū)域是虛線能夠變道。此外車道模型中還需要包含道路的曲率、坡度、航向、橫坡等數(shù)學(xué)參數(shù),好讓車輛能夠準(zhǔn)確的轉(zhuǎn)向、制動、爬坡等。這些信息構(gòu)成了車道模型。還需要包含交通標(biāo)志牌、路面標(biāo)志等道路部件,還要標(biāo)注出特殊的點(diǎn)如GPS消失的區(qū)域、道路施工狀態(tài)等。
NDS和OpenDrive是目前常用的兩種靜態(tài)高精地圖存儲規(guī)范,標(biāo)準(zhǔn)規(guī)范的作用在于分離導(dǎo)航軟件與地圖數(shù)據(jù)以及不同導(dǎo)航系統(tǒng)間數(shù)據(jù)兼容。
NDS結(jié)構(gòu)中兩個基本概念:
Product database,一個NDS數(shù)據(jù)庫可能由幾個產(chǎn)品組成。每個產(chǎn)品相對獨(dú)立,版本控制及更新不受其他產(chǎn)品影響。如一個NDS包括一家公司的基本導(dǎo)航地圖數(shù)據(jù),和另外一家公司的興趣點(diǎn)數(shù)據(jù);
Update Region,更新區(qū)域能使 NDS數(shù)據(jù)庫能增加和更新替換地理信息,以區(qū)域?yàn)閱挝唬鐕?歐洲)或州(美國)。
NDS內(nèi)部的結(jié)構(gòu)包含三個組成部分:
Building Blocks,所有導(dǎo)航數(shù)據(jù)都屬于一個特定的building block,而一個building block能提供NDS的一個具體功能,典型的building block包括:路徑規(guī)劃、基本地圖顯示信息、語音等;
Level,由于空間尺度的不同,數(shù)據(jù)在block中可以劃分為不同level,大尺度空間的數(shù)據(jù)放在high level中,而細(xì)節(jié)數(shù)據(jù),放在low level中,對應(yīng)傳統(tǒng)電子地圖中的金字塔結(jié)構(gòu);
Content,其中存放了主題的地圖數(shù)據(jù),主要包含三個部分:Feature,Attribution和metaData這個和傳統(tǒng)的電子地圖在概念上是一致的,只是其中Feature表達(dá)的內(nèi)容的側(cè)重點(diǎn)更偏重于道路交通等,如下圖所示。
OpenDrive的定義中包含四個比較重要的概念:坐標(biāo)系、reference line(參考線)、車道(lane)、道路連接。
坐標(biāo)系,OpenDrive中使用geoReference元素定義了該文件使用的投影坐標(biāo)系,其中地理坐標(biāo)系為WGS-84,而投影坐標(biāo)系采用的是Transverse_Mercator,橫軸墨卡托投影,這是全局坐標(biāo),局部坐標(biāo)使用
reference line是路網(wǎng)結(jié)構(gòu)中一個很重要的概念,繪制地圖的時候先是畫reference line,reference line包含xy位置坐標(biāo)、路的形狀屬性,然后在reference line基礎(chǔ)上再去畫其他其他元素。
下圖是OpenDrive中路網(wǎng)結(jié)構(gòu)中的一個road,該road有三部分組成,藍(lán)色的reference line,車道lane,車道lane的其他feature(限速等)。
一個road中包含了很多的車道lane(lanes),而車道(lane)本身有寬度(width),以及虛線、實(shí)線等屬性參數(shù)(roadMark)。結(jié)合這些參數(shù),我們就能在reference line的基礎(chǔ)上將車道畫出來。
road之間的連接定義了兩種(每個road有唯一的ID),一種是有明確的連接關(guān)系,例如前后只有一條road,那么通過successor/predecessor進(jìn)行連接,如果前后的連接關(guān)系不是很明確,就需要一個junctions。
5
國外的高精地圖主要有Here、TomTom、Waymo(原Google地圖)等老牌圖商,其中Waymo的高精地圖目前僅用于自己的無人車披露信息非常少。此外因?yàn)槊绹牡貓D測繪政策限制較少,因此成為高精地圖創(chuàng)業(yè)者的天堂,比較有名的初創(chuàng)公司DeepMap、CivilMaps、lvl 5、Carmera。
和國外不同,我國有比較嚴(yán)格的地圖測繪政策限制,目前擁有“導(dǎo)航電子地圖資質(zhì)單位名單”的企業(yè)有18家。分別是四維圖新、高德、長地萬方、凱德、易圖通、城際高科、國家基礎(chǔ)地理信息中心、科菱航睿、光庭信息、浙江省第一測繪院、江蘇省基礎(chǔ)地理信息中心、靈圖、立德空間信息、滴圖科技、圖智科技、寬凳科技、江蘇晶眾。百度地圖就是通過子公司長地萬方開展導(dǎo)航電子地圖測繪的。國內(nèi)的地圖行業(yè)呈現(xiàn)三足鼎立的狀況,百度地圖、高德(阿里)、四維圖新(騰訊),其背后是互聯(lián)網(wǎng)巨頭對地圖入口的爭奪。當(dāng)然主機(jī)廠也不會將自動駕駛時代的附加紅利拱手讓給科技公司,比如上汽一方面跟阿里成立了合資的斑馬網(wǎng)絡(luò),開發(fā)了車載操作系統(tǒng),里面使用了高德的地圖,一方面又向高精地圖初創(chuàng)公司中海庭拋去了橄欖枝。
總的來說,高精地圖是目前L5以下的無人駕駛看得見的可行的基礎(chǔ)解決方案,對于未來L5是不是仍然使用高精地圖目前還不清楚,那在現(xiàn)有條件下如何大規(guī)模,高時效的進(jìn)行高精地圖數(shù)據(jù)的采集、更新,是整個行業(yè)應(yīng)該思考的問題。






















