


人工智能在未來必將受到高度關注。
說到人工智能,就不得不提自動駕駛技術。
現今的自動駕駛技術,還不能稱為真正意義上的人工智能,因為其不能在功能上實現完全的類人判斷。
與自動駕駛汽車相比,人類駕駛員特別擅長通過觀察和使用簡單的工具來導航他們以前從未駕駛過的道路。只有給自動駕駛汽車帶來更多類似人類的推理與判斷,它才能像人類駕駛員一樣,只使用簡單的地圖和可視化數據,便能夠在新的復雜環境中實現自主導航。
然而,技術的瓶頸使得無人駕駛汽車很難做到這一點。在每一個新的復雜地區,自動駕駛汽車必須通過數字地圖分析所有的道路,而這一過程不僅非常耗時,更與人類的駕駛習慣相悖。具體來說,現今的自動駕駛系統高度依賴數字化地圖(這些地圖通常是通過3d掃描生成的),這些地圖的生成和實時處理需要進行大量的計算。新型端到端系統:自動駕駛技術新突破
在未來,我們需要一種自動駕駛控制系統,僅使用攝像機數據和一個類似GPS的簡單地圖,就能“學習”人類司機行駛時的駕駛模式,而這才是未來人工智能所必經的道路。我們要求該自動駕駛系統經過訓練,就可以模仿人類駕駛員來控制無人駕駛汽車沿著計劃好的路線行駛在一個全新的未知區域。與人類駕駛員類似,我們還要求該系統能檢測出地圖與道路特征之間的任何不匹配問題用以及時的確定車輛當前的位置、傳感器狀態或地圖定位問題,以便實時糾正汽車的航向。
一種新型的端對端導航系統,為實現上述特點帶來了希望。
傳統的導航系統通過多個模塊來處理傳感器的數據,這些模塊為定位、映射、目標檢測、運動規劃和轉向控制等任務定制。多年來,無數的科研團隊一直在開發一種“端到端”導航系統,該系統能夠直接處理輸入的感官數據和輸出的轉向命令,而不需要中間任何專門的模塊。然而,到目前為止,這些模型都是嚴格按照安全路線設計的,沒有考慮真正駕駛時的隨機目的地問題。
傳感器
近期,麻省理工的研究人員改進了現今的端到端系統,使得自動駕駛汽車在一個以前從未訓練過的現實環境中實現了安全的駕駛。為了做到這一點,麻省理工的研究人員訓練該系統,要求其能預測在任何給定的駕駛時刻所有可能的駕駛指令,這在概率論中被稱為全概率分布。具體在訓練時,使用的是常規的卷積神經網絡(CNN)機器學習模型,該模型被廣泛用于圖像識別領域中。具體來說,在訓練過程中,系統首先從人類駕駛員那里觀察和學習人類如何的駕駛汽車,CNN模型將方向盤的轉動與它通過攝像機和輸入地圖觀察到的道路曲率聯系起來。通過大量數據的訓練,它學會了在各種駕駛情況下發出最有可能的轉向指令,這使得該系統可以輕松應對各種道路。不負眾望:道路實測
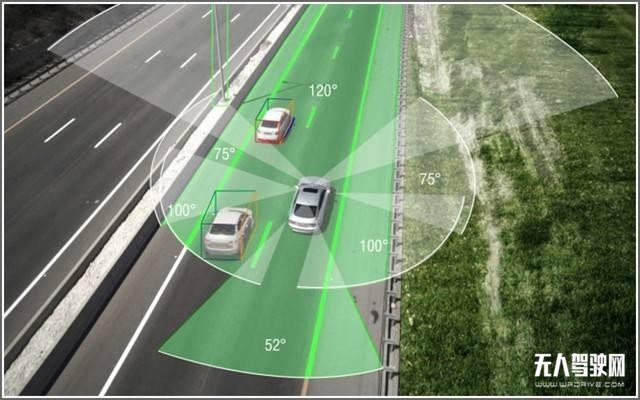
在測試中,研究人員向系統輸入一張隨機選擇路線的地圖。當駕駛時,該系統從攝像頭中提取視覺特征,使其能夠預測道路結構。例如,它識別一個遙遠的停車標志或路邊的換行標志,作為即將到來的十字路口的標志。在任意時刻,它都使用其預測的轉向命令概率分布來選擇最有可能遵循其路線的命令。
麻省理工的研究人員說,該系統最出色之處是其能夠使用易于存儲和處理的地圖數據。通常的自動控制系統往往使用激光雷達掃描來創建大規模、復雜的地圖信息數據,僅存儲舊金山一個城市就需要大約4,000 GB (4 TB)的數據。而對于每個新目的地,汽車又必須創建一個新的地圖,這意味著要重復處理大量的數據。而對于這一新系統,研究人員使用的地圖只需要40GB的數據就能捕捉到整個世界的任意一條道路。在自動駕駛過程中,系統還會不斷地將其視覺數據與地圖數據進行匹配,并記錄任何不匹配的地方。這樣做有助于自動駕駛汽車更好地確定它在道路上的位置。如果輸入的信息相互矛盾,它還能確保汽車保持在最安全的路徑上。比如,如果汽車在一條沒有轉彎的直線上行駛,而GPS顯示汽車必須右轉,汽車就會知道是繼續直線行駛還是停下來。
結尾:砥礪前行 路在遠方
自動駕駛技術在不斷的完善,也寓意著人工智能技術從新生到成長,如果問人工智能的路在何方,我想說,未來可期,路在遠方。






















