


目前生產自動駕駛汽車系統通常依賴大量的數據處理過程。安裝在汽車上的傳感器陣列收集的數據,能夠提供完整的道路視圖。但是理解這些數據,以及確定可能需要更多注意的物體和道路變化,需要昂貴的計算費用。
解決這個問題的一種方法是增強汽車自動駕駛系統的處理能力。但由于硬件需求和能耗增加,導致費用昂貴。另一種方法是使驅動系統在用盡資源時具有選擇性,有目的在某些區域使用更少的循環周期,并將剩余的用于更重要的元素。
據外媒報道,近期,美國專利商標局(US patent and Trademark Office)公布了蘋果公司的“深度感知傳感器數據處理”(Depth perception sensor data processing)的專利申請,該專利描述了系統如何對傳感器數據進行選擇性處理。

據該專利申請文件,傳感器數據處理系統從車輛上的傳感器接收數據,并生成環境深度數據表。該系統能夠使用一個或多個無源傳感器設備,如相機,為整個環境生成一個整體地圖,包括圖像數據和深度數據,使系統對當前區域有一個基本的了解。然后,由一個或多個有源傳感器設備,如激光雷達等更密集的硬件,生成第二組數據,并與模型進行比較。接著,使用更多的有源傳感器數據對模型進行迭代調整,直到“置信”模型準確到足以適用于自動駕駛系統中的其他部件。
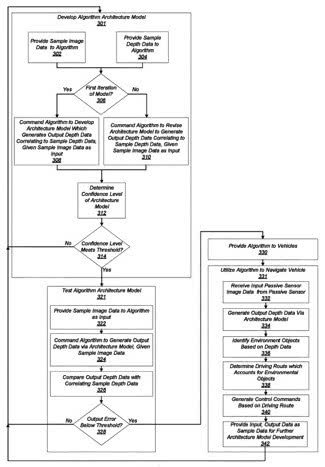
該專利將置信水平定義為基于“每次調整迭代對算法的修訂幅度”。簡而言之,它會一直利用傳感器數據來調整模型,直到可以忽略不計為止。這可以使自動駕駛系統節約資源、降低成本、提高性能。通過更快地創建道路模型,系統可以更早地識別物體,從而反應更靈敏,并且更安全。蘋果公司表示,該專利還可以使用機器學習或深度學習算法來更好地改進模型調整和物體識別過程。該公司還建議使用多輛車的傳感器系統,提供更廣泛的可監測環境范圍,擴大車輛的有效“視野”。
盡管蘋果公司每周都會向美國專利商標局提交大量專利申請而且此類專利申請也確實表明了蘋果對此領域的研發興趣,但并不能保證這些概念會成為商業產品或服務。






















