

您現(xiàn)在的位置:首頁 > 自動駕駛數(shù)據(jù)閉環(huán):實(shí)現(xiàn)高階自動駕駛的必由之路
自動駕駛數(shù)據(jù)閉環(huán):實(shí)現(xiàn)高階自動駕駛的必由之路
自動駕駛量產(chǎn)落地離不開車輛的“感知”、“決策”與“執(zhí)行”。
隨著感知技術(shù)與計算平臺的逐漸成熟與趨同,影響高階自動駕駛落地的關(guān)鍵因素不再是解決常見的一般案例(common case),而是解決“路口”問題,也即各類不常見但不斷出現(xiàn)的“長尾問題”。
作為一種模仿人類的科學(xué),AI自動駕駛與人類認(rèn)知世界的邏輯基本一致,想讓汽車更好地理解世界,就需要構(gòu)建更精準(zhǔn)的模型。但算法模型的建立并非一勞永逸,自動駕駛車輛在行駛過程中總會遇到各種陌生場景。
因此,如何對新場景數(shù)據(jù)進(jìn)行大規(guī)模高效處理并快速優(yōu)化算法模型,即成為自動駕駛技術(shù)迭代的關(guān)鍵。
換言之,構(gòu)建基于數(shù)據(jù)驅(qū)動的自動駕駛數(shù)據(jù)閉環(huán),讓數(shù)據(jù)實(shí)現(xiàn)高效流動,是實(shí)現(xiàn)高階自動駕駛的必由之路。
數(shù)據(jù)閉環(huán)不是一個新概念
數(shù)據(jù)閉環(huán)并非新概念,互聯(lián)網(wǎng)時代早期即有廣泛應(yīng)用。
一個比較典型的例子即是各類軟件、APP的“用戶體驗(yàn)改進(jìn)計劃”。
用戶在初次打開一款軟件時,往往會彈出選項(xiàng)——是否加入用戶體驗(yàn)改進(jìn)計劃。點(diǎn)擊確定后,軟件就會收集用戶的使用信息。在出現(xiàn)崩潰、Bug等場景下,軟件還會彈出信息,詢問是否允許上傳本次崩潰信息以幫助改進(jìn),比如Windows出現(xiàn)的各種錯誤報告。
點(diǎn)擊提交后,軟件開發(fā)商的工程師們會分析錯誤報告,以找出出現(xiàn)崩潰、Bug的原因,進(jìn)而修改代碼并在下次更新后予以解決。
用戶在使用過程中遇到的所有問題均可以通過此種方式解決,周而復(fù)始,不斷優(yōu)化軟件性能與使用體驗(yàn),這就是一種傳統(tǒng)的數(shù)據(jù)閉環(huán)。
這個過程可以用下圖簡單概括:

以上過程中,用戶的使用數(shù)據(jù)是關(guān)鍵因素,它可以幫助工程師快速定位問題,并予以解決。
隨著技術(shù)的進(jìn)步,傳統(tǒng)的數(shù)據(jù)閉環(huán)方式并沒有被時代所淘汰,在自動駕駛技術(shù)開發(fā)中仍被廣泛應(yīng)用,但與以往又有些許不同。
自動駕駛時代的數(shù)據(jù)閉環(huán)
自動駕駛系統(tǒng)的研發(fā)與優(yōu)化,與傳統(tǒng)軟件開發(fā)存在很多不同。
傳統(tǒng)軟件更多是在代碼端解決各類問題,但自動駕駛系統(tǒng)除代碼以外,還有更為關(guān)鍵的AI模型。代碼端的問題可以通過傳統(tǒng)的數(shù)據(jù)閉環(huán)方式予以解決,但模型端的調(diào)整則需要重新訓(xùn)練或優(yōu)化AI算法模型。
因此,自動駕駛數(shù)據(jù)閉環(huán)需要在傳統(tǒng)數(shù)據(jù)閉環(huán)方式上,引入一些新東西:
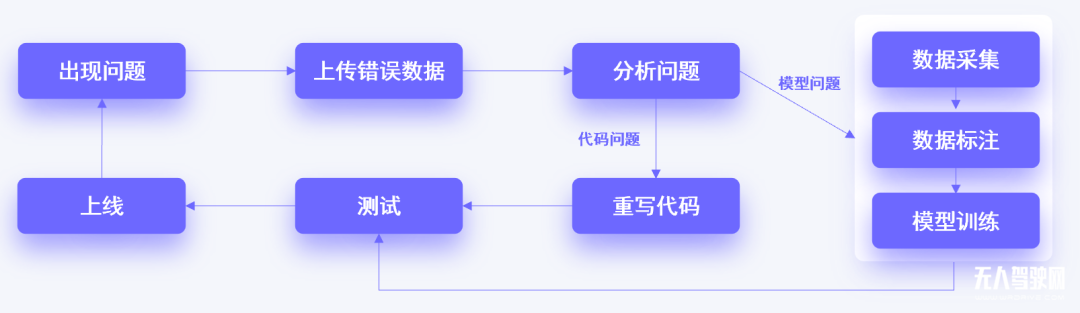
模型問題的解決流程可以進(jìn)一步細(xì)化為:
而支持自動駕駛數(shù)據(jù)閉環(huán)實(shí)現(xiàn)周而復(fù)始、不斷向前的關(guān)鍵,也是新場景數(shù)據(jù)的不斷投喂。
數(shù)據(jù)之于自動駕駛的重要性正被重新審視,各大自動駕駛廠商紛紛推出自己的數(shù)據(jù)閉環(huán)方案。
Tesla:核心為Autopilot數(shù)據(jù)引擎框架。獲得數(shù)據(jù)后,先通過單元測試確認(rèn)模型誤差,然后進(jìn)行數(shù)據(jù)清洗與標(biāo)注,最后完成模型訓(xùn)練與部署。

目前Tesla已經(jīng)積累了上百億英里的行駛數(shù)據(jù),這些海量的真實(shí)路況數(shù)據(jù),既是Tesla核心資產(chǎn),同時也幫助Tesla實(shí)現(xiàn)了模型的快速迭代與升級,為率先搶占高級別的自動駕駛技術(shù)高地平添一大助力。
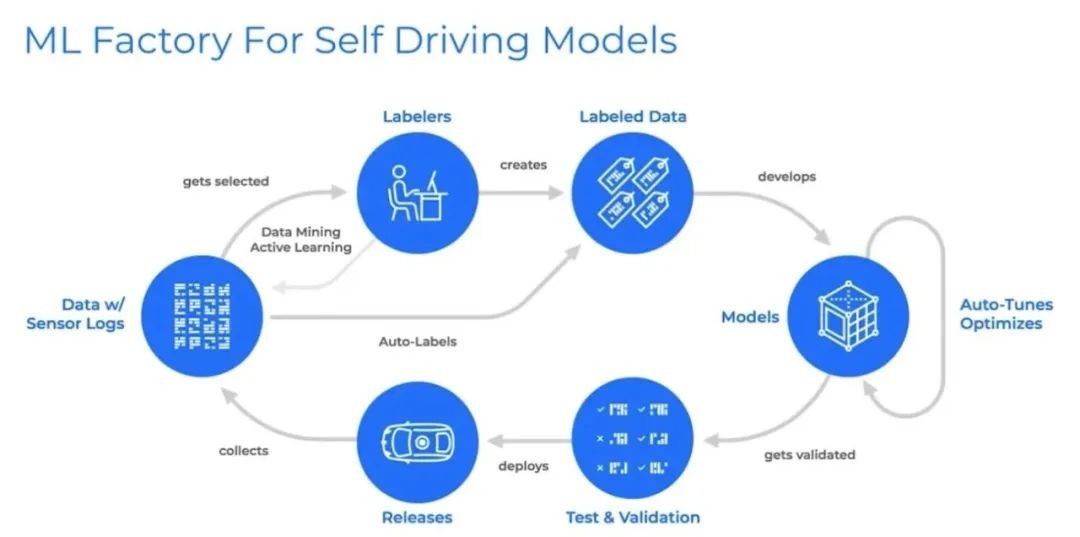
Waymo:相較于Tesla,Waymo引入了數(shù)據(jù)挖掘、主動學(xué)習(xí)、自動標(biāo)注等模塊,但基本的框架相差無幾。獲得數(shù)據(jù)來源后,通過數(shù)據(jù)標(biāo)注獲得數(shù)據(jù)真值,其中涉及到數(shù)據(jù)篩選、挖掘和主動學(xué)習(xí),模型優(yōu)化完成測試后,進(jìn)行發(fā)布或部署。
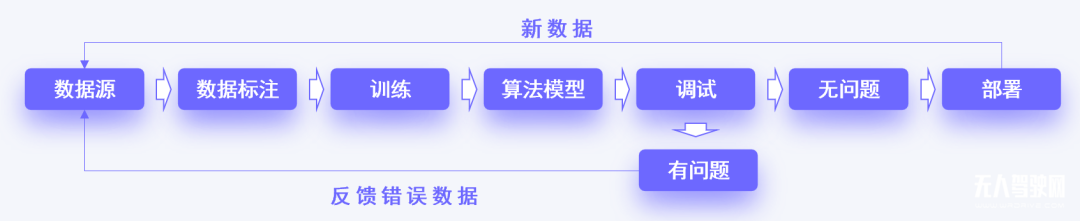
其他自動駕駛公司還會在數(shù)據(jù)閉環(huán)中引入仿真、計算等功能模塊,但自動駕駛數(shù)據(jù)閉環(huán)通用基本框架可簡化為:
數(shù)據(jù)采集-數(shù)據(jù)標(biāo)注-模型訓(xùn)練-部署,如此周而循環(huán)往復(fù)。
數(shù)據(jù)高效流轉(zhuǎn)是關(guān)鍵
現(xiàn)實(shí)駕駛場景難以窮盡,極其復(fù)雜且不可預(yù)測,需要AI模型快速迭代升級。實(shí)現(xiàn)自動駕駛數(shù)據(jù)閉環(huán)的快速循環(huán)迭代,以滿足新場景模型適配問題,同時也需要各“長尾場景”數(shù)據(jù)的高效流轉(zhuǎn)。
模型訓(xùn)練方面,目前AI算法模型已階段性基本成熟。在實(shí)際應(yīng)用時,不同場景需要解決的問題不盡相同。這并非算法模型的問題,而是場景適配度的問題。自動駕駛AI模型后續(xù)調(diào)優(yōu)主要以數(shù)據(jù)迭代為主,需要投喂海量新場景數(shù)據(jù)。
數(shù)據(jù)采集方面,依靠遍布車身的各類傳感器,車輛每小時采集的數(shù)據(jù)量可達(dá)數(shù)TB之多。然而采集得到數(shù)據(jù)為非結(jié)構(gòu)化數(shù)據(jù),這些未經(jīng)處理的數(shù)據(jù)并不能直接用于模型訓(xùn)練,標(biāo)注后才能產(chǎn)生使用價值。
橫亙在數(shù)據(jù)與模型訓(xùn)練之間的首要問題是如何高效處理海量數(shù)據(jù)集,真實(shí)數(shù)據(jù)規(guī)模已然成為智能駕駛行業(yè)的“命脈”。
然而與指數(shù)型增長的數(shù)據(jù)服務(wù)需求相比,無論數(shù)據(jù)處理效率亦或是數(shù)據(jù)產(chǎn)出質(zhì)量均難以滿足市場需求。
產(chǎn)能方面,大部分?jǐn)?shù)據(jù)服務(wù)商業(yè)務(wù)規(guī)模、執(zhí)行效率與項(xiàng)目經(jīng)理能力高度綁定,產(chǎn)能瓶頸問題凸顯;數(shù)據(jù)產(chǎn)出質(zhì)量方面,以點(diǎn)云數(shù)據(jù)為代表的數(shù)據(jù)處理需求占比逐漸擴(kuò)大,傳統(tǒng)依靠簡單工具和依賴人力的業(yè)務(wù)執(zhí)行方式,也早已無法滿足垂直市場的需求。
自動駕駛實(shí)現(xiàn)規(guī)模化量產(chǎn),數(shù)據(jù)服務(wù)領(lǐng)域能否率先實(shí)現(xiàn)突破將成為關(guān)鍵。
AI驅(qū)動的數(shù)據(jù)閉環(huán)
作為行業(yè)領(lǐng)先的數(shù)據(jù)服務(wù)廠商,曼孚科技深知自動駕駛數(shù)據(jù)服務(wù)行業(yè)痛點(diǎn)。
相較于傳統(tǒng)SLG模式業(yè)務(wù)增長需要堆積人力的方式,曼孚科技回歸科技創(chuàng)新本質(zhì),以PLG(產(chǎn)品驅(qū)動增長)模式代替SLG模式,重視產(chǎn)品力塑造,構(gòu)建起高效的數(shù)據(jù)閉環(huán),直擊數(shù)據(jù)產(chǎn)能與數(shù)據(jù)產(chǎn)出質(zhì)量兩大核心痛點(diǎn)。
曼孚科技數(shù)據(jù)閉環(huán)方案以AI為主要驅(qū)動力,重視AI對數(shù)據(jù)標(biāo)注的反哺作用,實(shí)現(xiàn)低成本量產(chǎn)高質(zhì)量結(jié)構(gòu)化數(shù)據(jù);數(shù)據(jù)處理能力的提升為算法的訓(xùn)練與調(diào)優(yōu)提供充足燃料,優(yōu)質(zhì)算法既可再次反哺數(shù)據(jù)標(biāo)注,也可在部署應(yīng)用中源源不斷產(chǎn)出新數(shù)據(jù),如此形成正向循環(huán)往復(fù),實(shí)現(xiàn)高效迭代升級。

AI驅(qū)動的數(shù)據(jù)閉環(huán)
在自動駕駛數(shù)據(jù)標(biāo)注方面,作為行業(yè)唯一聚焦自動駕駛賽道的數(shù)據(jù)智能平臺,MindFlow SEED平臺既支持2D圖像場景下的車道線、車輛行人、泊車、全景語義分割等類型標(biāo)注,也同步支持3D點(diǎn)云場景下的車路協(xié)同、連續(xù)幀、點(diǎn)云融合、點(diǎn)云語義分割等標(biāo)注類型。
在增效降本方面,平臺還創(chuàng)新性地引入自動化生命周期管理、AI增強(qiáng)等模塊,AI標(biāo)注平均準(zhǔn)確率可達(dá)90%以上,部分場景可實(shí)現(xiàn)完全AI標(biāo)注量產(chǎn)。
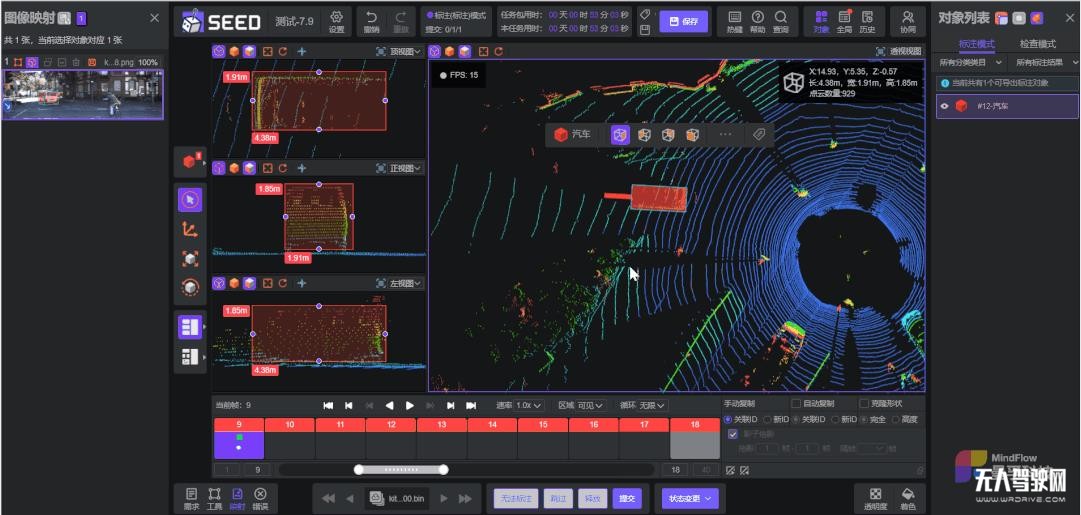
AI標(biāo)注
(注:根據(jù)訓(xùn)練模型在已標(biāo)注的測試集上進(jìn)行預(yù)處理后通過IoU算法進(jìn)行計算,IoU閾值在0.9以上算正確計算)。
憑借產(chǎn)品與流程上的創(chuàng)新變革,過往堆積人力的執(zhí)行方式被平臺產(chǎn)品所取代,業(yè)務(wù)執(zhí)行規(guī)模不再與項(xiàng)目經(jīng)理人數(shù)綁定,從源頭端解決AI應(yīng)用場景持續(xù)拓展對高質(zhì)量多源異構(gòu)數(shù)據(jù)的海量需求。
未來,曼孚科技將持續(xù)聚焦自動駕駛數(shù)據(jù)閉環(huán)構(gòu)建,專注提升真實(shí)數(shù)據(jù)規(guī)模量產(chǎn)能力,為自動駕駛商業(yè)落地增添更多助力。
成員中心
- 廈門星創(chuàng)易聯(lián)科技有限公司
- 青島智騰微電子有限公司
- 巨視慧行(武漢)科技有限公司
- 墨翟科技(上海)有限公司
- 深圳市乾思迪電子科技有限公...
- 廣州市杜格科技有限公司
- 西安海格電氣技術(shù)有限公司
- 深圳市三旺通信股份有限公司
- 深圳市百年星科技有限公司
- 禾純展覽(上海)有限公司
- 華為技術(shù)有限公司
- 上海兆越通訊技術(shù)有限公司
- 廣州美凱信息技術(shù)股份有限公...
- 玖新文化傳媒(上海)有限公...
- 北京銘世博展覽有限公司
- 北京銘世博國際展覽有限公司
- 恒興國際會展(北京)有限公...
- 廣州領(lǐng)拓儀器科技有限公司
- 北京市龍源國際會展覽有限公...
- 北京市龍源國際會展有限公司